Resources
White Papers and Application Notes
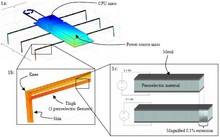
Investigating the Use of a Piezoelectric Actuator for the Appendages of a Microrobot
Published in 2008
We investigate the use of a piezoelectric actuator for the appendages of a microrobot. Possible uses may include micro assembly, mobile surveillance, etc. What is different about this microrobot is that it uses 2 degrees of freedom, low powered piezoelectric flexures, while attempting to mimic the maneuverability of an ant-like insect. In the paper, we use COMSOL to characterize this type of piezoelectric actuator in terms of microrobotic locomotion, load carrying capacity, and power consumption per stride.
Download
- Clark.pdf - 0.6MB