Multibody Dynamics Module Updates
For users of the Multibody Dynamics Module, COMSOL Multiphysics® version 5.2a brings the ability to model gears, which is useful for power transmission and automotive simulations. A variety of gear components have been added to the Parts Library for easy model setup, and many newly added tutorial models illustrate potential applications for this user-driven functionality. Read about the complete updates to the Multibody Dynamics Module below.Modeling Gears
Functionality for modeling gears has been added to the Multibody Dynamics interface. You can model a system of gears used for power transmission. There are nodes available for several types of gears and racks, including: Spur Gear, Helical Gear, Bevel Gear, Worm Gear, Spur Rack, and Helical Rack. A gear can be connected to other gears by adding the following nodes to the model tree in the Model Builder: Gear Pair, Worm and Wheel, and Rack and Pinion.
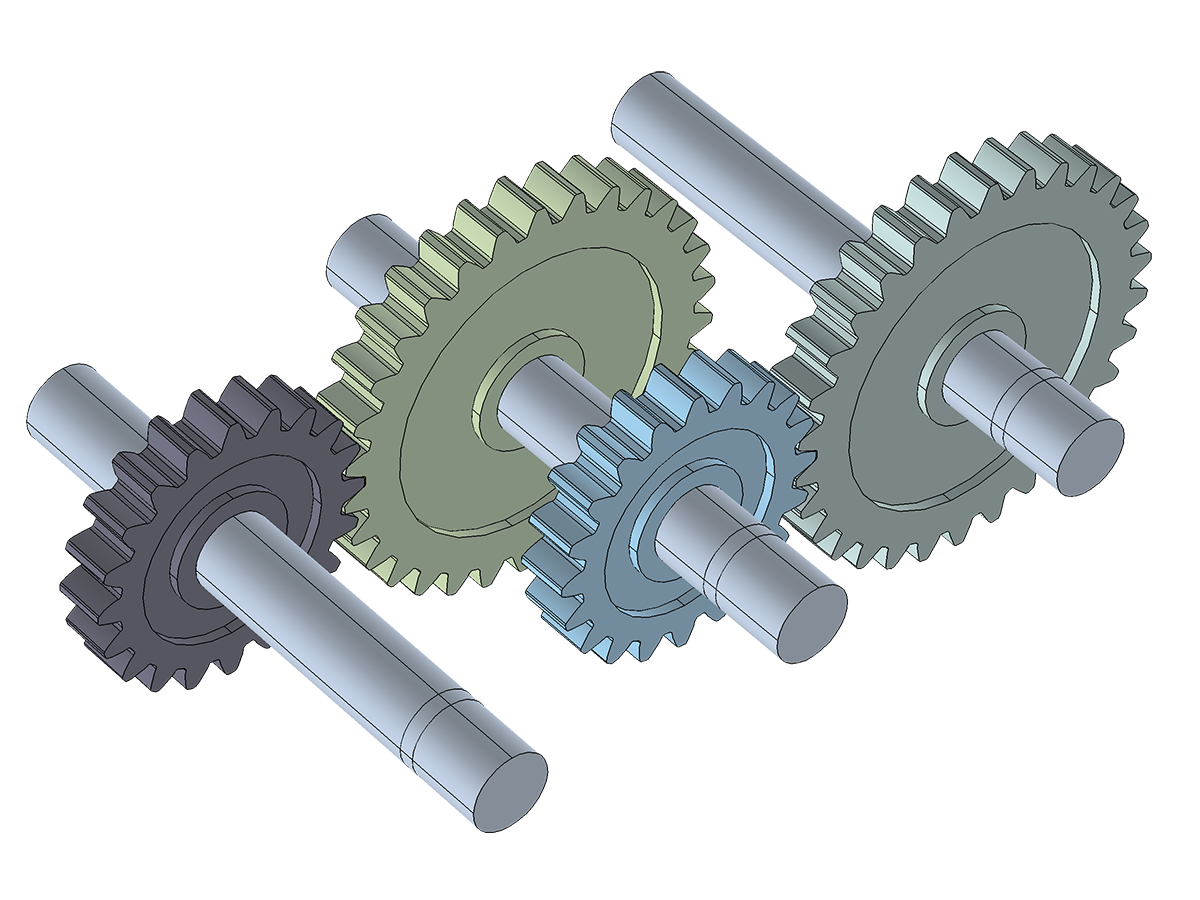
A compound gear train, modeled using the new Gears functionality in the Multibody Dynamics interface.
A compound gear train, modeled using the new Gears functionality in the Multibody Dynamics interface.
In the Model Builder, a gear is defined as a rigid body. However, it is also possible to specify a finite stiffness for a gear mesh when connecting to other gears. In the Model Builder, a Gear Elasticity node can be added as a subnode to a Gear Pair node in order to define the elastic properties of the gear mesh, such as mesh stiffness, mesh damping, and contact ratio.
A pair of gears can be assumed to be an ideal pair without any static transmission error or backlash. When there is a static transmission error, which could be due to geometrical errors and geometrical modifications, a Transmission Error subnode can be added to the Gear Pair node. Such examples include a gear running out, misalignment, or the occurrence of tooth tip and root relief. Similarly, in the case where there is a backlash that affects the dynamics of the system, a Backlash subnode can be added to the Gear Pair node.
Furthermore, a Friction subnode can be added to a Gear Pair node to account for frictional forces at the contact point. Frictional forces are dominant only when there is a significant slip at the contact point. The slip could be due to the change in the center distance or if the axes of both gears are neither parallel nor intersecting. The worm and wheel pair is an example of this type of operation, where an inherent slip is present even under perfect conditions.
Application Library path examples that show the modeling of gears:
Multibody_Dynamics_Module/Automotive_and_Aerospace/differential_gear
Multibody_Dynamics_Module/Tutorials/gear_train
Multibody_Dynamics_Module/Tutorials/helical_gear_pair
Multibody_Dynamics_Module/Verification_Examples/bevel_gear_pair
Gears in the Parts Library
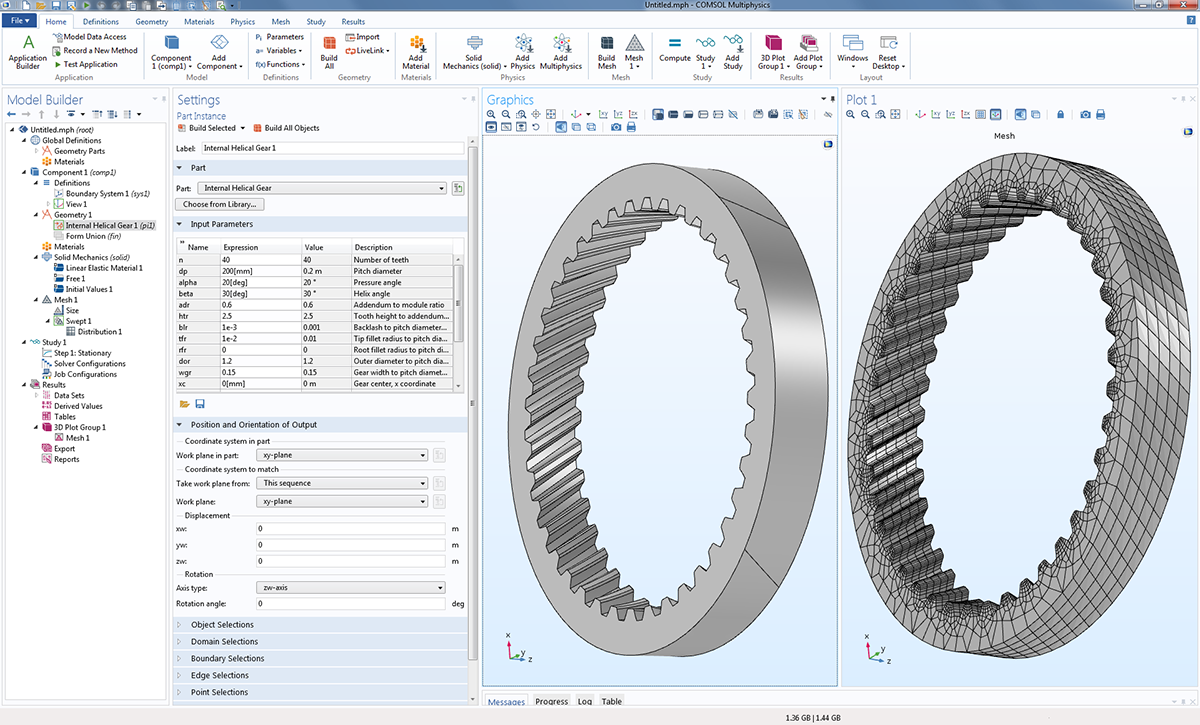
A number of parameterized gear geometries have been added to the Parts Library. Different types of gears can be created using these parts for both 3D and 2D models. The input parameters of the parts can be modified to customize the gear tooth and gear blank shape. These parts can be used to build a gear tooth, a single gear, a pair of gears, or a parallel or planetary gear train.
The available gear parts are divided into three categories:
-
External Gears
- Spur Gear
- Helical Gear
- Bevel Gear
- Worm Gear
-
Internal Gears
- Spur Gear
- Helical Gear
-
Spur Gear
- Spur Rack
- Helical Rack
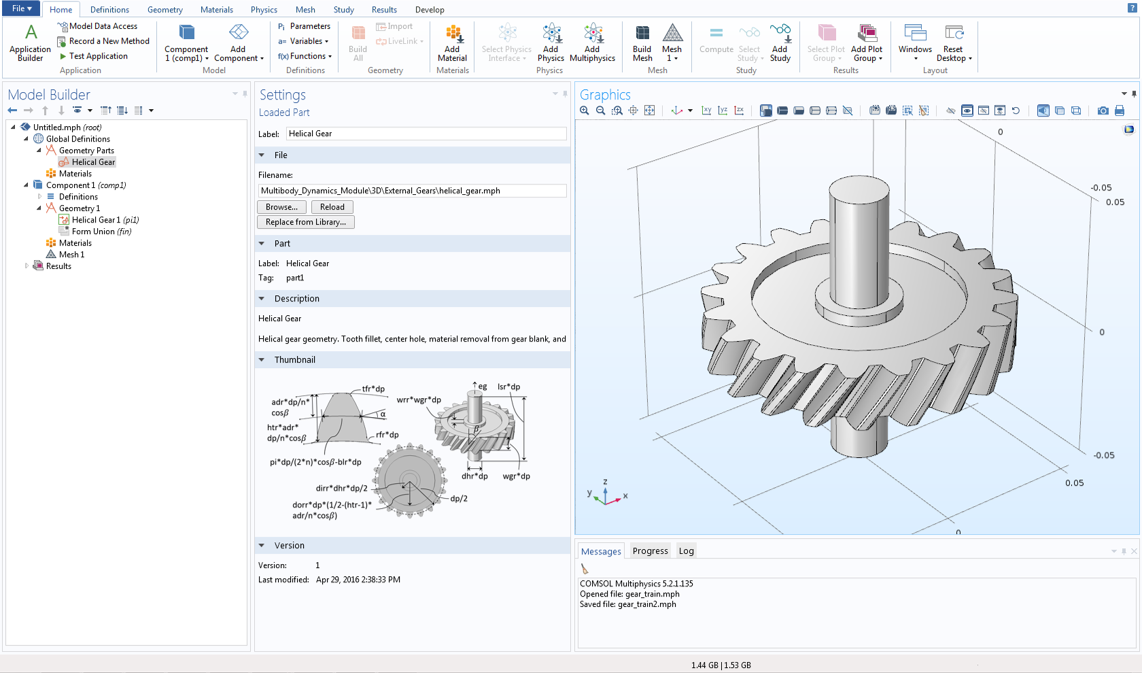 A helical gear geometry, created using the gear parts available in the Parts Library of the Multibody Dynamics Module.
A helical gear geometry, created using the gear parts available in the Parts Library of the Multibody Dynamics Module.
{kind=link}
New Tutorial Model: Differential Gear Mechanism
This model simulates the mechanism of a differential gear used in cars and other wheeled vehicles. A differential allows the outer drive wheel to rotate faster than the inner drive wheel during a turn. This is necessary when a vehicle turns in order to allow the wheel that is traveling along the outside of the turning curve to roll faster and to cover greater distance than the wheel on the inside of the turning curve. The average of the rotational speed of the two driving wheels is simply the input rotational speed of the drive shaft. An increase in the speed of one wheel is balanced by a decrease in the speed of the other.
A transient analysis is performed to compute the motion of the spider gears in cases where a vehicle moves on a straight or curved path. The velocity magnitude of the different components and the angular velocity of inner and outer wheels are calculated for the two cases.
Application Library path for the tutorial model that demonstrates differential gear mechanisms:
Multibody_Dynamics_Module/Automotive_and_Aerospace/differential_gear
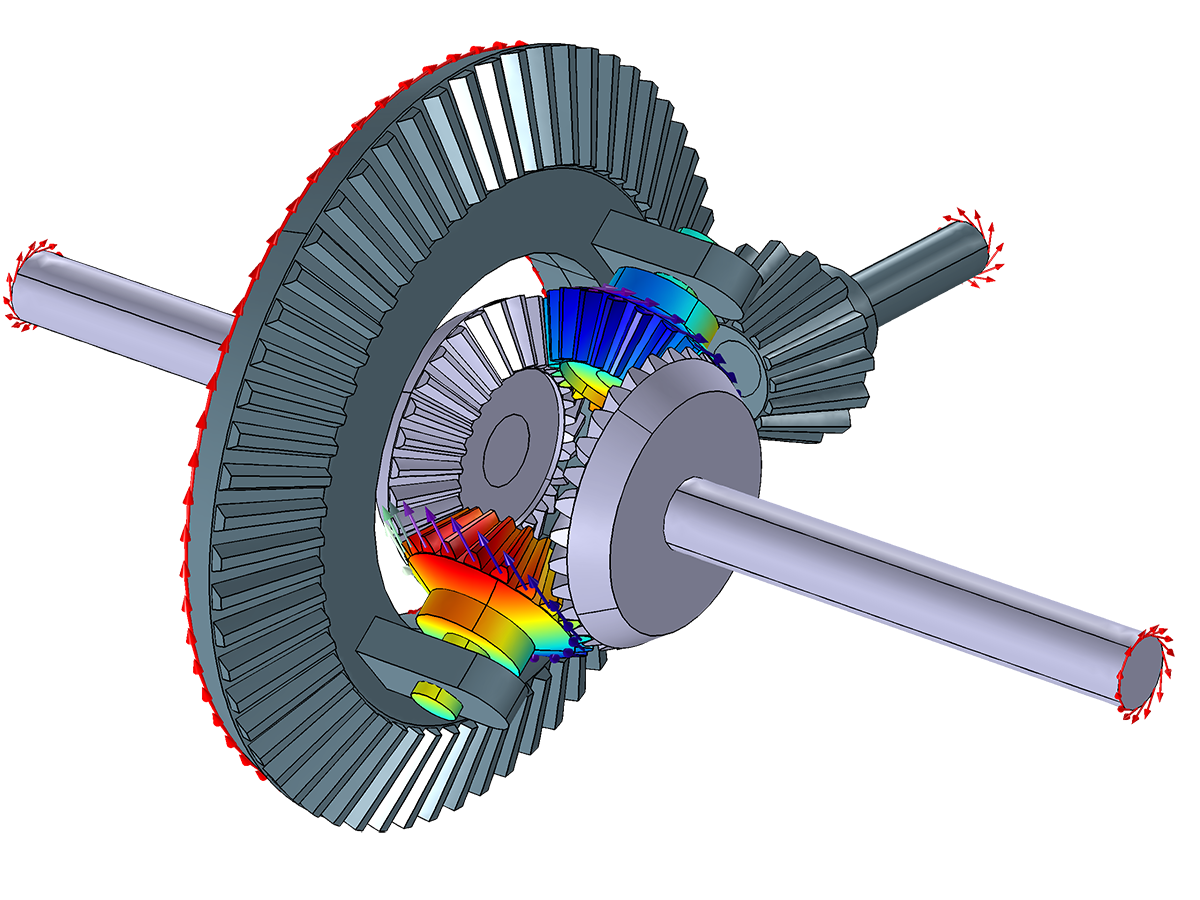 A differential gear mechanism, allowing the two axles of the vehicle to rotate at different speeds. The magnitude of the speeds and direction of the rotations are shown.
A differential gear mechanism, allowing the two axles of the vehicle to rotate at different speeds. The magnitude of the speeds and direction of the rotations are shown.
New Tutorial Model: Vibrations in a Compound Gear Train
This model simulates vibrations in a compound gear train. Spur gears, used to model the gear train, are mounted on rigid shafts and where the shafts are supported by elastic housing on both ends. The gear mesh is assumed to be elastic with varying stiffness, which is the source of sustained vibration. A transient analysis is performed to compute the dynamics of the gears as well as the vibrations in the housing.
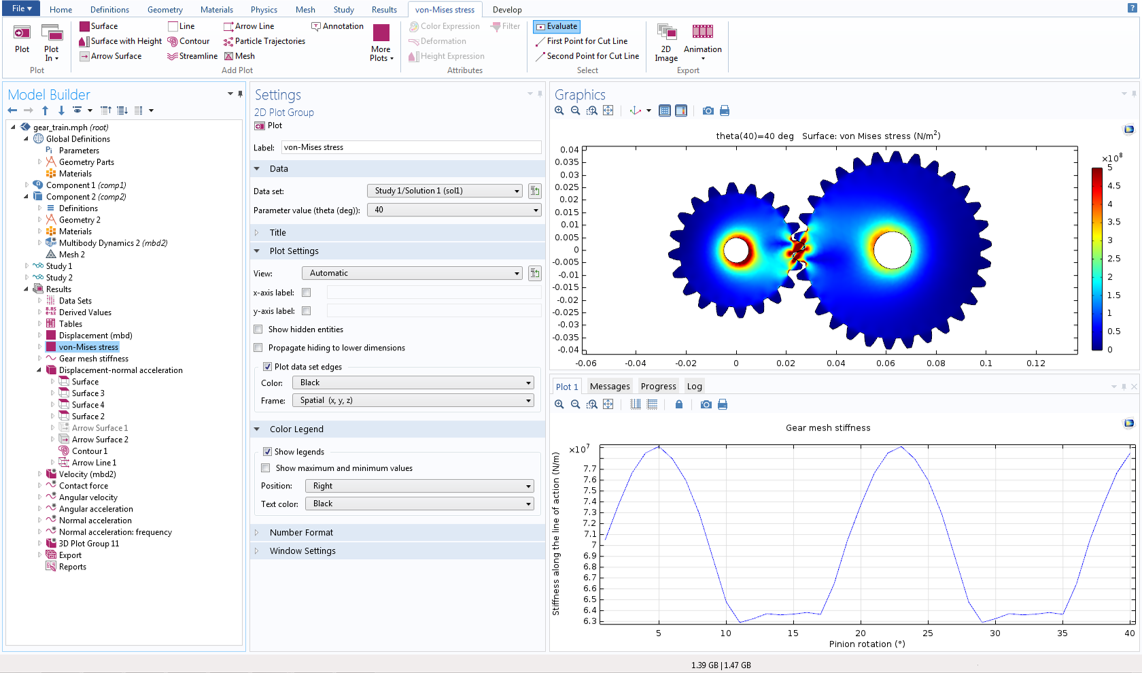
Contact modeling is used for the computation of the gear mesh stiffness. A parametric analysis is performed to compute the gear mesh stiffness as a function of gear rotation in one mesh cycle.
The model calculates the von Mises stress distribution in the gear pair, where the stresses are high at the contact points, as well as at the roots of the teeth. The gear mesh stiffness, displacement in the gears, and the normal acceleration in the housing due to vibration are also calculated.
Application Library path for the tutorial model:
Multibody_Dynamics_Module/Tutorials/gear_train
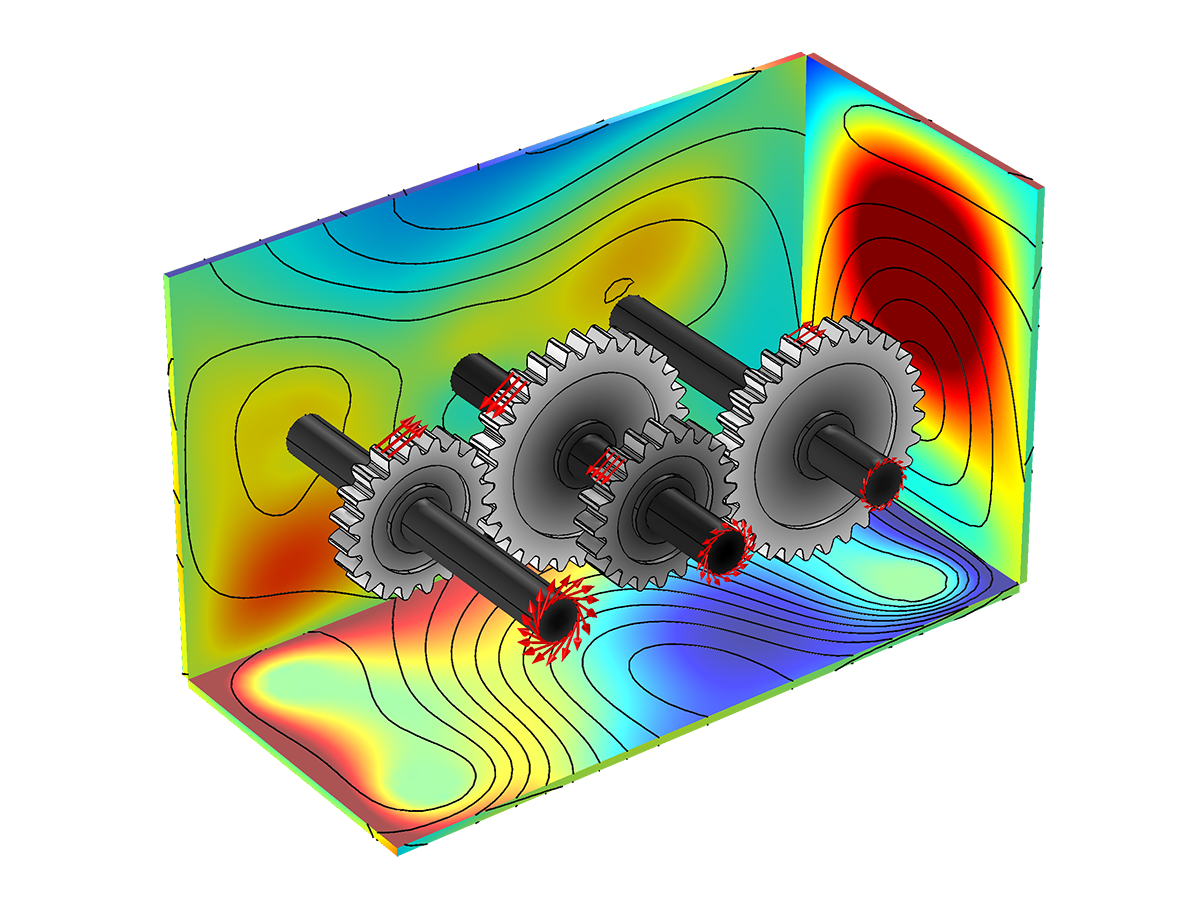 The normal acceleration in the housing due to the vibrations induced by the elastic gear mesh. Also shown is the grayscale plot of the displacement of the gears.
The normal acceleration in the housing due to the vibrations induced by the elastic gear mesh. Also shown is the grayscale plot of the displacement of the gears.
{kind=link}
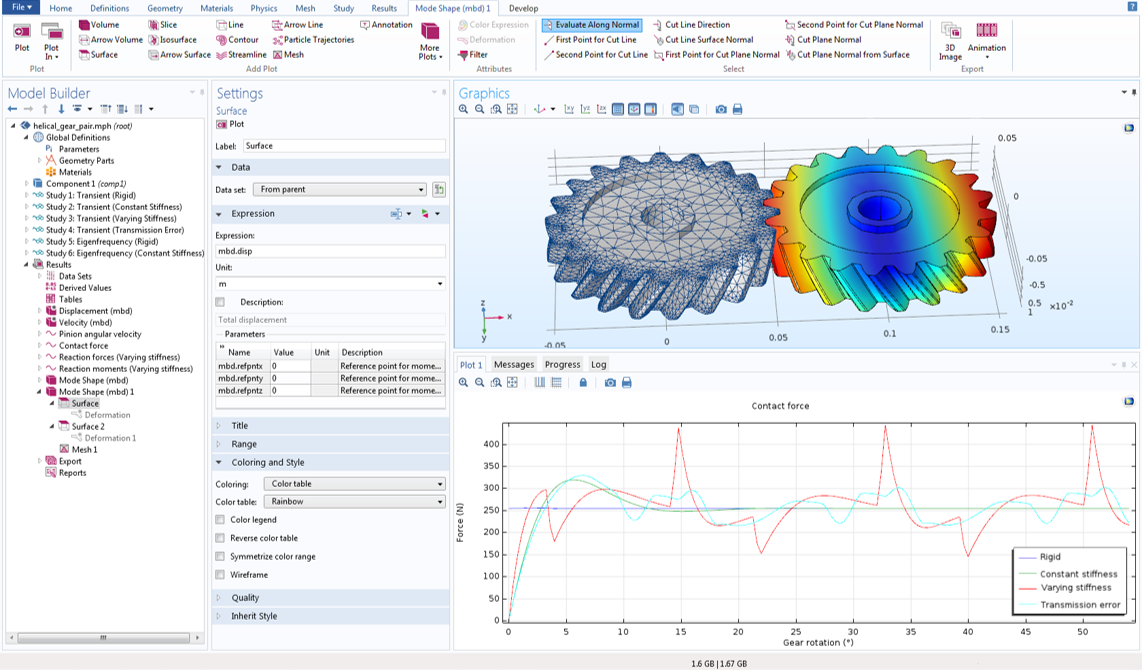
New Tutorial Model: Dynamics of Helical Gears
This tutorial model illustrates the dynamics of helical gears. It considers the case where the gear mesh is assumed to be rigid or elastic. A transient study is performed to analyze the effect of constant gear mesh stiffness, varying gear mesh stiffness, the transmission error on the contact force, and the angular velocity of gears. An eigenfrequency analysis is performed to compute the natural frequencies and mode shapes of the gear pair for the rigid and elastic gear meshes.
Application Library path for the tutorial model:
Multibody_Dynamics_Module/Tutorials/helical_gear_pair
{kind=link}
New Tutorial Model: Forces and Moments on Bevel Gears
This tutorial model simulates a pair of straight conical bevel gears. The gears are modeled as rigid, but one of the gears is fixed while the other is hinged on a rigid bar. The rigid bar is also hinged at a point lying on the axis of the fixed gear. A transient analysis is performed to compute the forces and moments at the center of the fixed gear. The results of the analysis are compared with the results of a reference from an international journal.
Application Library path for the tutorial model:
Multibody_Dynamics_Module/Verification_Examples/bevel_gear_pair
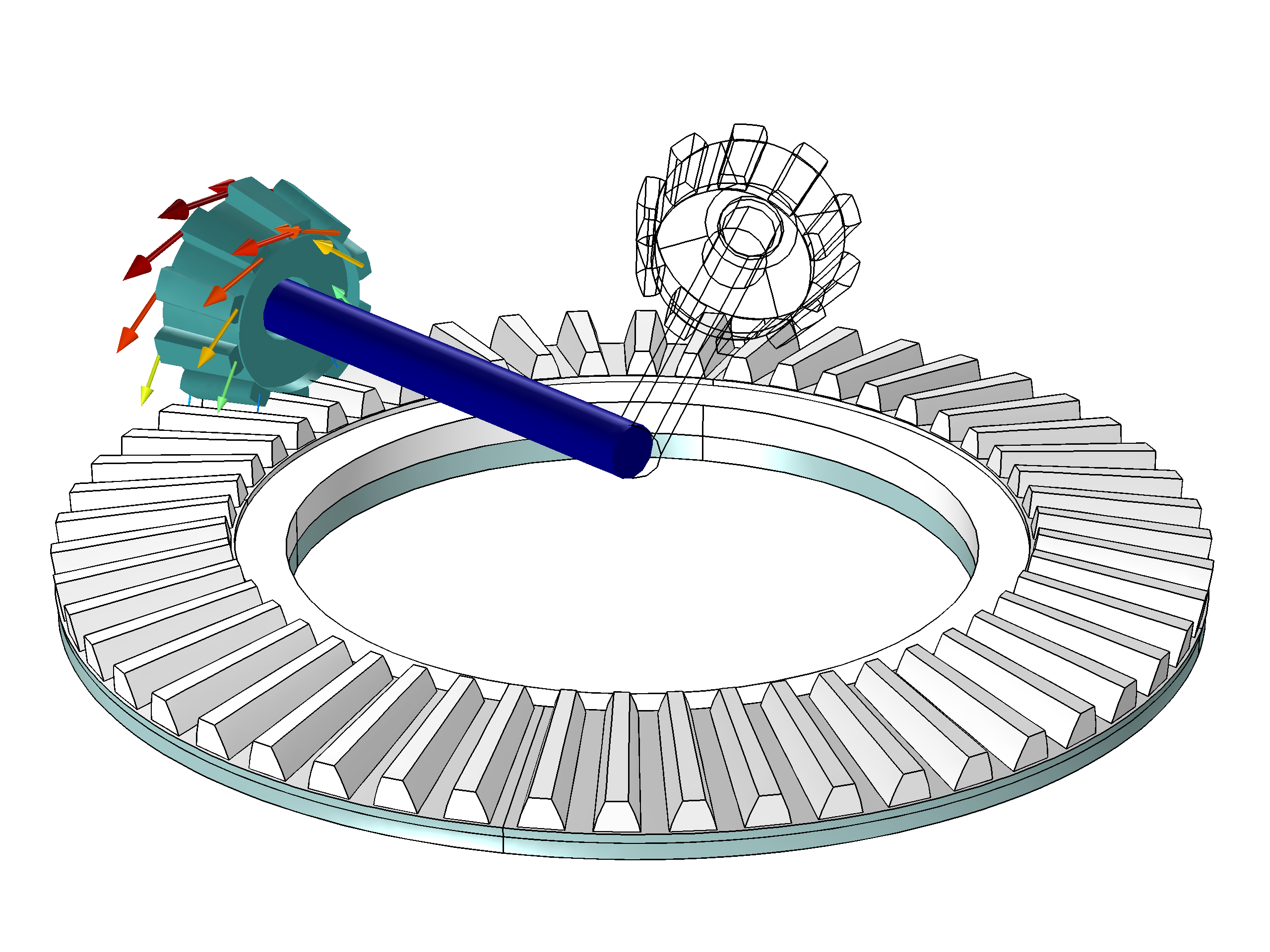 The motion of a bevel gear when an incremental rotation is prescribed to the rigid bar.
The motion of a bevel gear when an incremental rotation is prescribed to the rigid bar.