Stress Analysis on a Capsule Robot Due to the Peristaltic Movement of the Intestine
A significant population of microorganisms (bacteria, archae and fungi) live inside the gastrointestinal (GI) tract, and are collectively known as microbiota [1]. The microbiota contain lifelong information on the health of an individual and can assist in early diagnosis of diseases such as cancer, diabetes and obesity [2–3]. Microbiota can also help study the relationship or interaction between nutrition and human health [2]. Given the significance of gut microbiota, several methods are used to collect a sample of microbiota from the human gut. The most common samples used as a proxy for intestinal microbiota are faecal samples; however, they do not categorise spatial inhabitants, and it is not possible to localise them. Similarly, they lack temporal information and cannot reciprocate real-time gut environment as they are examined after travelling through the entire GI tract, which exposes the sample to contamination [4]. Some efforts have been made in obtaining samples from the human gut with biopsy; however, it is a tethered method which largely restricts its use to the large intestine [5]. Furthermore, the sample obtained by biopsy is a tissue sample, and it cannot fully capture microbial content from the intestine.
Based on the limitations of faecal sampling and biopsies using tethered methods, several researchers have begun to use non-invasive capsule robots to navigate the GI tract. In our recent work, we have developed an actuation mechanism which facilitates the capsule robot in collecting the sample from the gut [6]. The mechanism was tested ex-vivo on intestinal tissue and proved its functionality. The major challenge is to test the capsule robot in-vivo in live animals or humans, which requires knowledge of the exact pressure applied by the intestine on to the capsule robot. The literature shows a clear gap for simulating such a dynamic environment for studying the intestinal pressure. The intestine is a dynamic environment and modelling this along with the capsule robot is a challenge, as less information is available about the exact forces applied by the intestine.
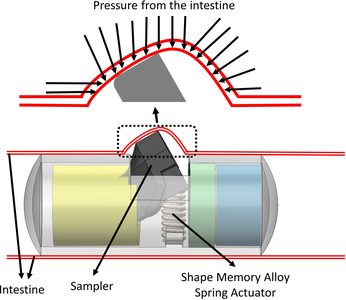
The capsule robot under study uses a shape memory alloy (SMA) spring to expose the sampler for collecting the microbial content as illustrated in Figure 1. At the same time, the sampler is under stress from the peristaltic movements which restricts its exposure against the intestinal wall. This environment is modelled in COMSOL® to check the feasibility and validate the proposed capsule design. The peristaltic wave with a frequency of 7 seconds is generated which applied a pressure of 1 N/m2. A capsule robot is moved inside the 100mm intestine with a velocity of 1.9mm/s and the velocity profiles are shown in Figure 2 (axisymmetric view) and Figure 3 (3D view). The pressure on the capsule is analysed as shown in Figure 4. In future, the capsule robot shown in Figure 1 will be simulated to include the heating of shape memory alloy spring and its expansion to observe the overall effect on the sampler both from the intestine and the SMA spring.
Download
- Rehan_COMSOL Presentation.pdf - 0.7MB