Modeling MEMS Gyroscopes with COMSOL Multiphysics®
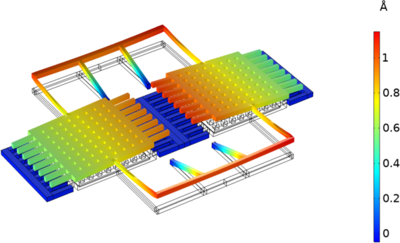
MEMS gyroscopes are typically challenging to model due to the variable length scales present in the device (typically 1000:1) and because the devices themselves are highly sensitive to both environmental and manufacturing-process-induced deviations from the ideal geometry. In this paper, we look at various techniques to model MEMS gyroscopes, using as an example a simple 1-axis device based loosely on the early Draper gyroscope design.
To model the electrostatic actuation of the gyroscope’s comb drives, we employ an equation-based, nonlinear force that depends on the relative positions of the comb stators and rotors. We use the COMSOL Multiphysics® software’s genext() operator in combination with the Structural Mechanics interface to implement these forces in a manner that has been shown to be scalable with larger devices. For this case study, we use a relatively crude model for the comb forces, but we discuss potential improvements. We then look at the use of the Deformed Geometry interface to model the effect of various manufacturing defects on the device, focusing on the effect of sidewall angle. The Deformed Geometry interface allows for complex manufacturing variations to be captured in the model (for example, variations that vary spatially), and, importantly, the use of the same mesh for an ideal device and a device with the defect of interest allows for an accurate assessment of the effect of tiny variations on performance. Finally, we consider the effect of external environmental factors on the device performance, taking as an example the deformation of the substrate into a cylindrical shape. (This is intended as a proxy for thermal or mechanical stresses that result in substrate deformation.)
The examples presented in this paper are available for further review in the COMSOL Multiphysics® 5.6 Application Libraries. The authors would like to acknowledge Chien Liu for providing useful feedback and for preparing these models.
Download
- Veryst_MEMS_gyro_Paper_16_9.pptx - 15.27MB