Modeling, Simulation, and Control of Dual Electromagnet Active Magnetic Levitation
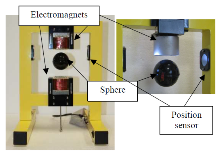
Introduction: The dual electromagnet configuration of Active Magnetic Levitation system (AML) where the electromagnets are locate opposite to each other, constitutes and single axis of the Active Magnetic Bearing. The same configuration can be used to test the single electromagnet AML controller. A single electromagnet AML was modeled and simulated with COMSOL Multiphysics. The modeling and simulation of the AML configuration is required when a new devices are designed or existing one are modeled for the verification and controller synthesis purposes. In both cases there is a request to add the control feedback to keep the levitated object at the desired position. Therefore, the model must be extended with the motion dynamics and controller formula. Such models are also useful for educational purposes to demonstrate interdisciplinary aspects of modeling, simulation and control. Use of COMSOL Multiphysics: Modeling with support of COMSOL Multiphysics is well suitable for educational and research purposes. In the past versions there was the possibility to embed the model into MATLAB®/Simulink®. It was a great solution for the controller design and dynamic simulation. At this moment the connection is available via LiveLink for MATLAB®. In this case the controller design and closed loop simulation can be realized in two ways: a) directly in COMSOL Multiphysics – this require to embed the motion dynamics and controller equations into the software; b) supported with MATLAB® – using the COMSOL model M-file to solve the model. With this elaboration the first version is considered due to many features like: a) common multiphysics modeling; b) moving mesh option; c) ODE solver; d) possibility to embed linear and nonlinear controller formula; e) availability to model in 2D, 3D and axial symmetry modes; f) availability to include electric circuit into the model. Results: The dual electromagnets AML model was realized in the axis symmetry mode due to the modified construction of the real laboratory test rig (MLS2EM). Two cylindrical electromagnets were installed and the spherical ferromagnetic object is levitating between them. The object’s position is sensed by the optical sensor. The model of such system contains: a) components geometry, actuators properties – identical as exists in the real system; b) motion dynamics described by the ODE; c) control action for a single and/or both electromagnets to achieve the levitation under external excitation, differential control mode and independent control mode. Conclusion: The application of COMSOL Multiphysics for dual AML system allows to provide a number of control experiments in the simulation mode. The application of multi-turn coils increases the computational effort in comparison to the coil controlled directly by the current density. The simulation is provided in conditions similar to the experimental one. In this case the developed controller can be simulated before embedding into the hardware layer. The controller structure and formula can include all hardware features and limitations. The designed model and controller can be optimized for the target application on the base of simulation results.
Download
- pilat_poster.pdf - 0.28MB
- pilat_paper.pdf - 0.25MB
- pilat_abstract.pdf - 0.11MB