Numerical simulation of pesticide spray distribution by UAV for Precision Agriculture
Precision agriculture is a multidisciplinary approach that integrates agronomy, engineering, and as well mathematics to improve on agricultural outcomes: one of the main challenges is to develop efficient management systems to effectively distribute (and reduce the use of) pesticides aiming at protecting crops from pests. Recently, the use of Unmanned Aerial Vehicle (UAVs) to perform this task has largely increased, thanks to their manoeuvrability, timeliness, performance and spraying efficiency. Nevertheless, in aerial spraying, several factors must be taken into account: among others, the airflow of the drone rotors has a significant impact on the trajectory of the spray droplets. The main purpose of the study is thus to simulate such flow and study the qualitative and quantitative distribution of product sprayed over a specific area. The work pipeline has been as follows:
1) Acquisition of the domain geometry (CAD MODULE): in order to perform the simulation, it was beforehand necessary to import the geometry of the helix, which has been reconstructed via a 3D scanner campaign. The scanner result was a point-cloud and the goal was to reproduce the helix boundary. We started performing a preprocessing phase via Matlab (mainly to downsample the point cloud) that lead to the creation of an .stl file that represents quite precisely the helix boundary: this type of files can be easily imported on COMSOL. In order to build this geometry, the helix was imported. Next we added two concentric cylinders centered in the rotation axis of the helix. The innermost rotates the helix during the simulation, the biggest represents the volume in which the solution is computed.
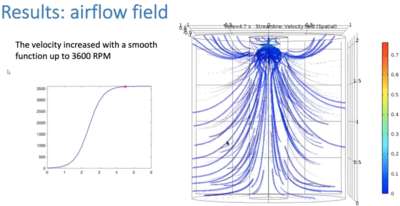
2) Simulation of airflow around the rotor (CFD ROTATING MACHINERY WITH LAMINAR FLOW): the UAV is supposed to spray the product while in hovering at a rotor velocity of approximately 3500 rpm. Whilst the helices are designed to create low turbulence, we found that the use of the Turbulent Flow module was beneficial, but the added computational time justifies the module we actually used.
3) Spray simulation: in order to explore the time-dependent distribution of the spray particles, we conducted an unsteady study, using the same module as in 2) and a specific feature in the result settings: the Particle Trajectory with Mass, which allows to trace particles with mass from a specific region (nozzle). The droplets have an average diameter of 200 μm with a mass of around 1.8e-9 g. A parametric study was led in order to understand the best altitude for the drone to effectively spray the crops.