Simulation and Verification of a Capacitive Proximity Sensor
State of the art proximity sensors are most often based on optical or tactile methods. Although these sensor systems are widely used (e.g. clamping protection) the reveal several drawbacks. Most optical sensors need a line of side whereas tactile sensors cannot be used to determine a distance to an approaching object. Capacitive sensing technology has proven to be an interesting alternative to these methods. It works contactless, with a variety of materials and allows monitoring complex structures comprising a volumetric measurement principle.
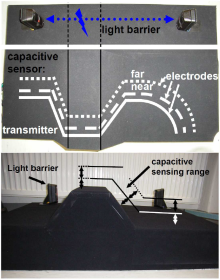
With the help of simulation and optimization results (obtained with COMSOL) an experimental setup is built to demonstrate the measurement principle compared to state of the art technologies. Additionally COMSOL is used to verify the measurement results.
Download
- schlegl_presentation.pdf - 0.37MB
- schlegl_paper.pdf - 0.2MB