Using COMSOL® for the Development of the UK’s Second Hyperloop Prototype
Hyperloop is a future concept of mass transportation proposed by Elon Musk. It uses electromagnetic propulsion to accelerate a passenger or cargo pod through a low-pressure tube. HYPED, the University of Edinburgh’s Hyperloop Team has created a prototype that uses linear halbach arrays for passive levitation [1] and electrodynamic wheels (halbach wheels) for propulsion [2]. COMSOL Multiphysics® was used at different stages of the design process of said prototype, from determining the correct parameters of the propulsion and levitation systems, to analysing the heating induced in the track.
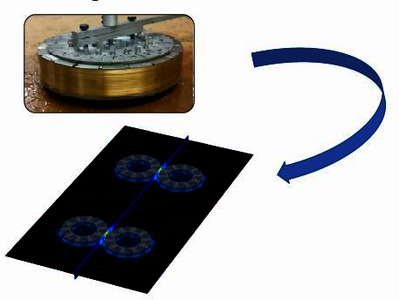
The physical principles behind EM levitation are well known. The time varying magnetic field generated by the travelling linear halbach array creates a force that causes the pod to levitate. Similarly, due to rotational and translational movement of the electrodynamic wheel eddy currents are induced in the guideway, creating an opposing magnetic field, in accordance with Lenz’ law. According to the relative velocity between the bottom part of the wheel and the track (slip), thrust and braking forces are generated. This results in a negligible resistive force. The study focuses on these electrodynamic wheels and linear halbach arrays magnetic levitation systems. Furthermore, both rotating halbach wheels and moving halbach arrays create eddy currents in the track, thus heating it, which was also taken into account (Joule heating). As electrodynamic wheels are used for braking as well, a range of safe acceleration and deceleration values is determined.
Multiple COMSOL Multiphysics® modules were used for the different types of simulations performed. The Rotating Machinery, Magnetic interface of the AC/DC module was used to simulate the halbach wheel. The Magnetic Fields formulation was used for the halbach arrays. The Heat Transfer interface and Multiphysics Electromagnetic Heating node are being used to estimate the heating of the track and temperature profile of the time-dependent study of 2D is produced. Furthermore, the interaction between two parallel halbach wheels was investigated. The efficiency of the system was determined by analysing the momentum transfer between the two wheels.
A lot of the simulations performed were computationally expensive. As such, HYPED acquired a powerful desktop PC on which simulations were performed remotely, using COMSOL Server™.
These simulations enabled us to pick suitable design variables for our prototype’s propulsion system, such as the radius of the halbach wheels, the number of magnets and optimal RPM, as well as the expected forces generated by this system.
References: [1] Post, R.F. and Ryutov, D.D., 2000. The inductrack: A simpler approach to magnetic levitation. IEEE Transactions on Applied Superconductivity, 10(1), pp.901-904.
[2] Paudel, N. and Bird, J.Z., 2012. General 2-D steady-state force and power equations for a traveling time-varying magnetic source above a conductive plate. IEEE Transactions on Magnetics, 48(1), pp.95-100.
Download
- malekos_poster.pdf - 0.92MB
- malekos_paper.pdf - 1.59MB
- malekos_abstract.pdf - 0.03MB