Differential Gear Mechanism
Application ID: 36281
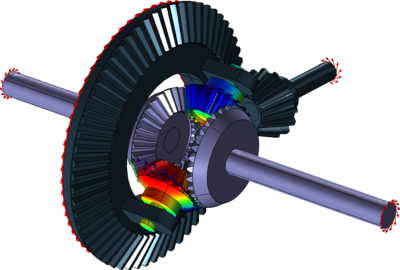
This model simulates the mechanism of a differential gear used in cars and other wheeled vehicles. A differential allows the outer drive wheel to rotate faster than the inner drive wheel during a turn. This is necessary when a vehicle turns in order to allow the wheel that is traveling along the outside of the turning curve to roll faster and to cover greater distance than the wheel on the inside of the turning curve. The average of the rotational speed of the two driving wheels is simply the input rotational speed of the drive shaft. An increase in the speed of one wheel is balanced by a decrease in the speed of the other.
A transient analysis is performed to compute the motion of the spider gears in cases where a vehicle moves on a straight or curved path. The velocity magnitude of the different components and the angular velocity of inner and outer wheels are calculated for the two cases.
This model example illustrates applications of this type that would nominally be built using the following products:
however, additional products may be required to completely define and model it. Furthermore, this example may also be defined and modeled using components from the following product combinations:
The combination of COMSOL® products required to model your application depends on several factors and may include boundary conditions, material properties, physics interfaces, and part libraries. Particular functionality may be common to several products. To determine the right combination of products for your modeling needs, review the Specification Chart and make use of a free evaluation license. The COMSOL Sales and Support teams are available for answering any questions you may have regarding this.