Dynamics of a Roller Chain Sprocket Assembly
Application ID: 78181
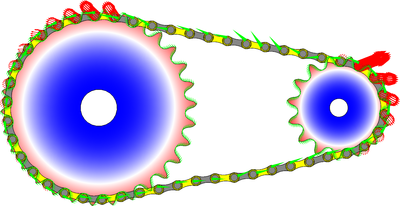
Chain drives are used for transmitting power from one shaft to another, located at some distance. This example simulates the dynamics of a chain sprocket assembly in 2D. The geometry consists of a roller chain wrapped around two sprockets. Both chain links and sprockets are assumed to be rigid. An angular velocity is prescribed at the driver sprocket.
The geometry of the chain sprocket assembly is created using built-in geometry parts. The Chain Drive node in the Multibody Dynamics interface is used for setting up the entire model. Using a transient study, the dynamics of the system is analyzed for two cases: when the driven sprocket is unloaded, and when it is loaded by a counteracting external torque. In the latter case, the driven sprocket is also assigned an additional moment of inertia. The results show comparisons of chain link motion, contact forces, and other results.
This model example illustrates applications of this type that would nominally be built using the following products:
however, additional products may be required to completely define and model it. Furthermore, this example may also be defined and modeled using components from the following product combinations:
The combination of COMSOL® products required to model your application depends on several factors and may include boundary conditions, material properties, physics interfaces, and part libraries. Particular functionality may be common to several products. To determine the right combination of products for your modeling needs, review the Specification Chart and make use of a free evaluation license. The COMSOL Sales and Support teams are available for answering any questions you may have regarding this.