Multibody Dynamics Module Updates
For users of the Multibody Dynamics Module, COMSOL Multiphysics® version 5.3 brings a tutorial model that combines multibody dynamics with acoustics to simulate noise in a gearbox as well as a tutorial that combines the Multibody Dynamics Module with the AC/DC Module to simulate an induction motor. Learn more about these tutorials and other multibody dynamics modeling improvements below.
Highlighting Selections in Multibody Dynamics Analyses
When working with complex assemblies in the Multibody Dynamics interface, there may be many joints where each contains the selection of two rigid domains or attachments. When you select a Joint node in the model tree, the selected objects are now automatically highlighted in the Graphics window. This provides feedback on the correctness of the source and destination selections. Similarly, the two gears in a Gear Pair node and the two parts joined in a Spring-Damper node will also be highlighted when you select those corresponding nodes.
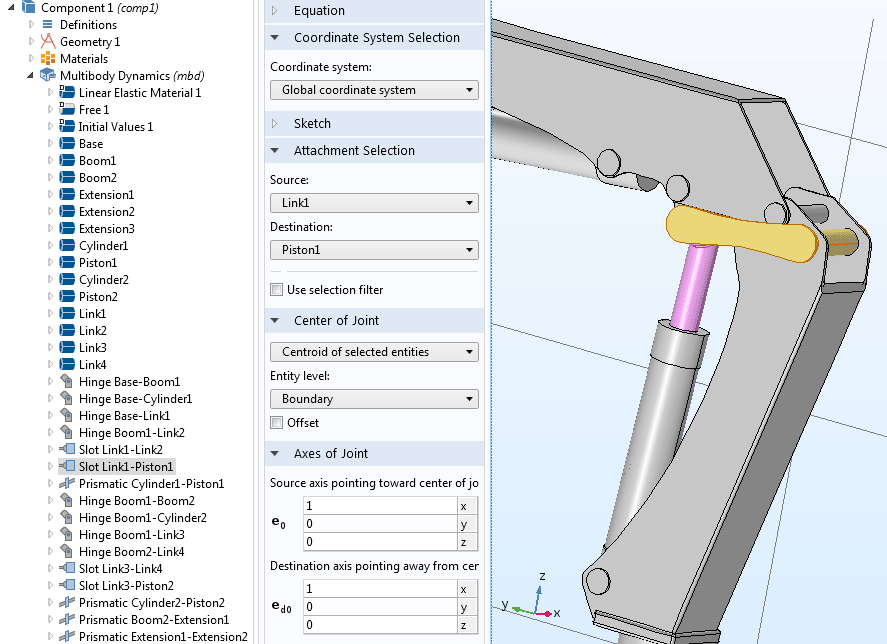
The two rigid domains that are connected by a hinge joint are highlighted when the respective Joint node is selected.
Penalty Method for Computing Joint Forces
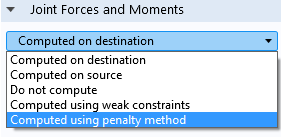
It is not unusual for a model to be overconstrained in rigid body systems. A penalty method for enforcing joint constraints has now been added to handle this situation. When this method is applicable, it is possible to determine the joint forces. Moreover, joint forces between rigid bodies are now not computed by default in order to reduce the risk of numerical problems being caused by overconstraints.
{kind=link}
Modal Reduced Order Model Study Type
The Modal Reduced Order Model study type is now supported in the Multibody Dynamics interface. This is useful for extracting system matrices represented in a modal base for large multibody dynamics models.
Attachments on Rigid Bodies
You can now use an Attachment option on a rigid domain, making it easier to switch between a rigid representation and an elastic representation. This avoids having to change and reselect the joint node in the respective domain and Settings window.
Discretize by Serendipity Shape Functions
When modeling flexible parts in the Multibody Dynamics interface, you can choose to discretize by serendipity shape functions. This will reduce the number of degrees of freedom when using structured meshes with higher-order elements in flexible domains.
Automatic Suppression of Rigid Body Motion
In cases where loads are self-equilibrating, the actual locations of where the required constraints are placed are not relevant. Self-equilibrating models can be analyzed as long as the specifications of the constraints fulfill the following conditions: rigid body motions are not possible and no reaction forces are introduced. Now, the new Rigid Motion Suppression condition can be used for these types of analyses. This feature automatically applies a set of suitable constraints based on the geometry model and physics interfaces.
The Rigid Motion Suppression condition is available for the following physics interfaces:
- Solid Mechanics (3D, 2D, 2D axisymmetric)
- Shell (3D)
- Plate (2D)
- Membrane (3D, 2D)
- Beam (3D, 2D)
- Truss (3D, 2D)
- Multibody Dynamics (3D, 2D)
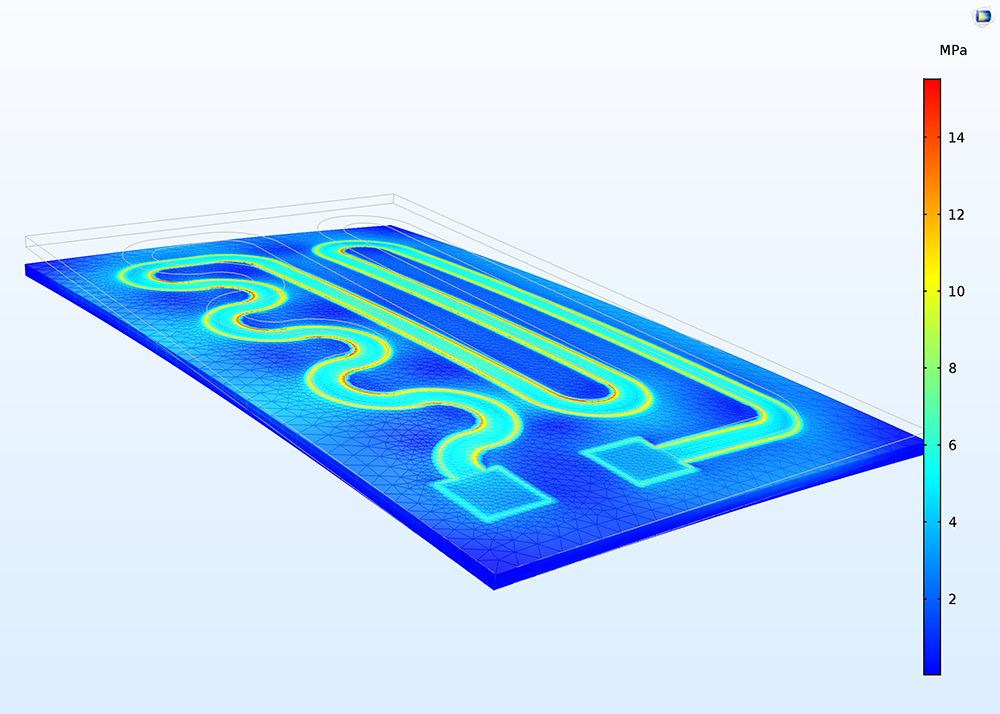
A heating circuit deforms due to thermal expansion in this example. Applying a Rigid Motion Suppression condition ensures that the model has sufficient constraints for a correct solution. The plot shows the von Mises stresses.
Application Library path for an example of rigid body motion suppression:
Structural_Mechanics_Module/Thermal-Structure_Interaction/heating_circuit
New Tutorial Model: Vibrations and Noise in a Gearbox
This tutorial model illustrates the modeling of vibration and noise in a 5-speed synchromesh gearbox inside a manual transmission vehicle. A transient multibody dynamics analysis computes the gearbox vibrations for the specified engine speed and external load. The normal acceleration of the gearbox housing is converted to the frequency domain, which is to be included as a source of noise. An acoustics analysis is then performed in order to compute the sound pressure levels in the near, far, and exterior fields.
Note: This model also requires the Acoustics Module.
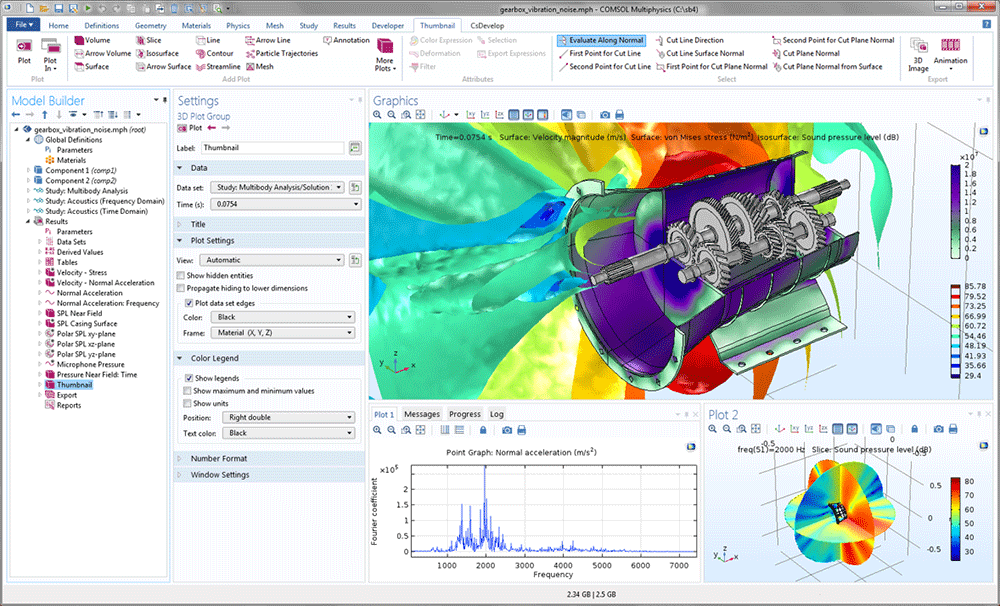 The stresses in the gearbox housing and the sound pressure level in the surrounding air (top and bottom-right) of a 5-speed synchromesh gearbox inside a manual transmission vehicle. The frequency spectrum of the normal acceleration at one of the points on the gearbox is also shown (bottom-left).
The stresses in the gearbox housing and the sound pressure level in the surrounding air (top and bottom-right) of a 5-speed synchromesh gearbox inside a manual transmission vehicle. The frequency spectrum of the normal acceleration at one of the points on the gearbox is also shown (bottom-left).
Application Library path:
Multibody_Dynamics_Module/Automotive_and_Aerospace/gearbox_vibration_noise
New Tutorial Model: Vibration in an Induction Motor
In the Induction Motor Vibration tutorial model, eddy currents are induced in the rotor by time-harmonic currents in the stator windings and rotation of the rotor. Induced currents in the rotor interact with the magnetic field that is produced by the coils to generate the driving torque on the rotor. The air gap between the rotor and stator is asymmetric, resulting in vibrations in the motor.
The electromagnetic simulation is modeled in 2D, whereas the multibody dynamics simulation is modeled in 3D. The rotational torque is calculated as a function of time. The torque is then used in the multibody dynamics model in order to compute the rotor speed, accounting for inertial effects. Due to resistive losses and loading torque on the shaft, the rotor will not revolve as fast as the stator windings, so an angular slip will occur.
Note: This model also requires the AC/DC Module and Structural Mechanics Module.
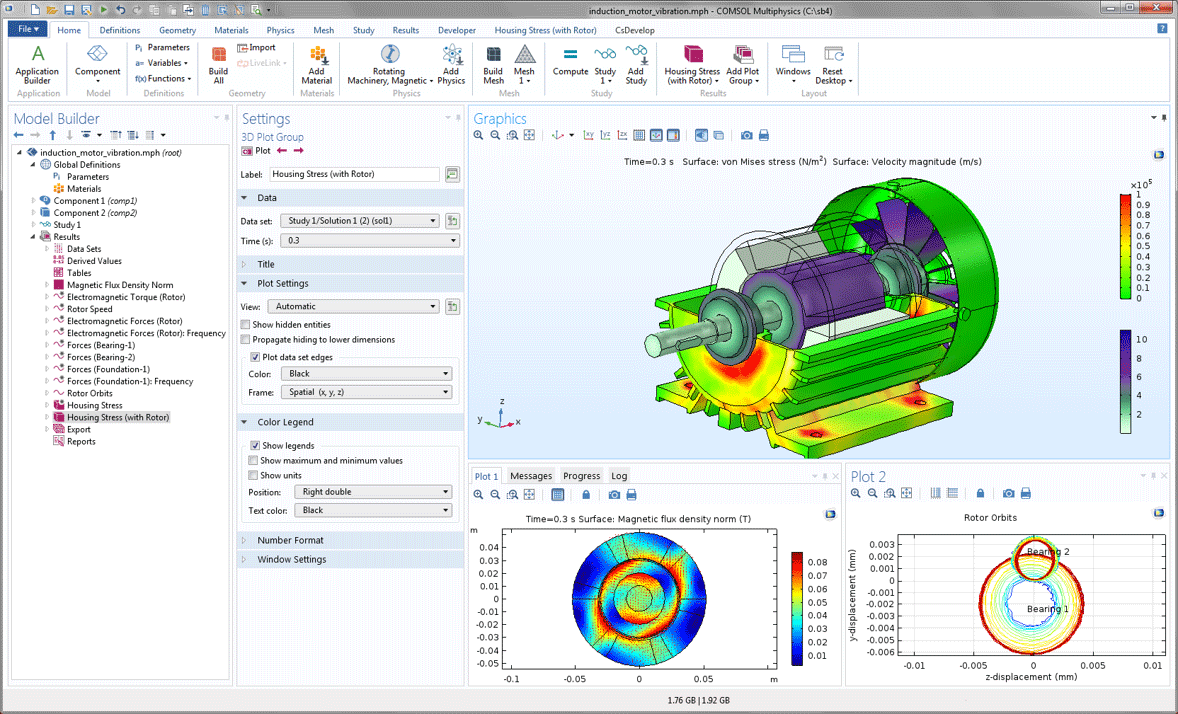 Plot of stresses in an induction motor's housing (top) and the magnetic flux density in the rotor (bottom-left). The rotor orbit at two bearing locations is also shown (bottom-right).
Plot of stresses in an induction motor's housing (top) and the magnetic flux density in the rotor (bottom-left). The rotor orbit at two bearing locations is also shown (bottom-right).
Application Library path:
Multibody_Dynamics_Module/Machinery_and_Robotics/induction_motor_vibration
New Tutorial: Noise Radiation by a Compound Gear Train
Predicting the noise radiation from a dynamic system gives designers insight into the behavior of moving mechanisms early in the design process. For example, consider a gearbox in which the change in the gear mesh stiffness causes vibrations. These vibrations are transmitted to the gearbox housing through shafts and joints. The vibrating housing further transmits energy to the surrounding fluid, resulting in acoustic wave radiation.
This tutorial model simulates the noise radiation from the housing of a gear train. First, a multibody dynamics analysis is performed in the time domain to compute the housing vibrations at the specified driver shaft speed. Then, an acoustic analysis is performed at a selected frequency to compute the sound pressure levels in the near, far, and exterior fields using the housing's normal acceleration as a noise source.
Note: This model also requires the Acoustics Module and the Structural Mechanics Module.
Normal acceleration on the surrounding box of the moving gear train. In the model, the radiated acoustic pressure is also calculated.
Application Library path:
Acoustics_Module/Vibrations_and_FSI/gear_train_noise