Geometry Modeling and Interfacing with CAD Software
Operations, Sequences, and Selections
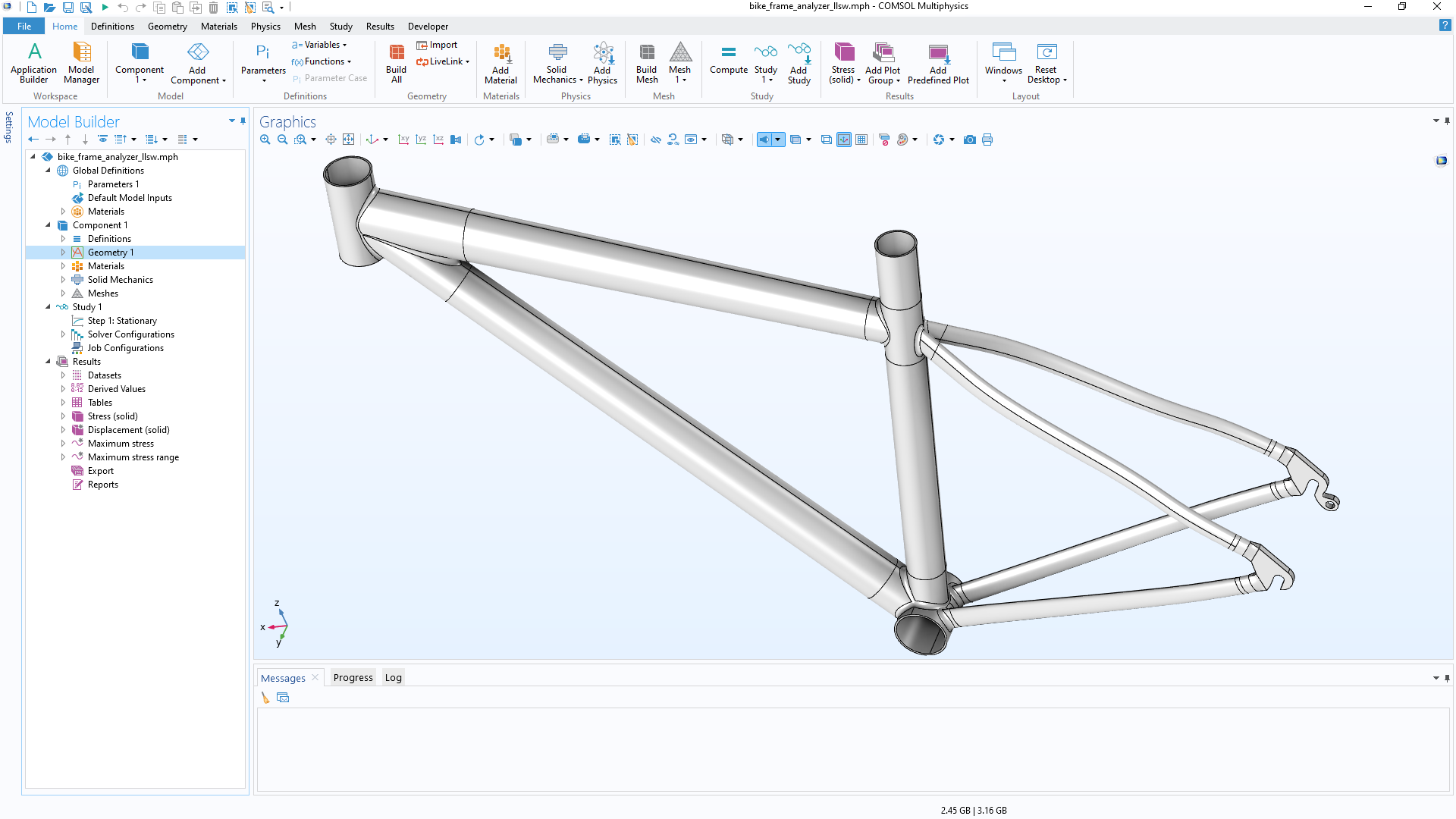
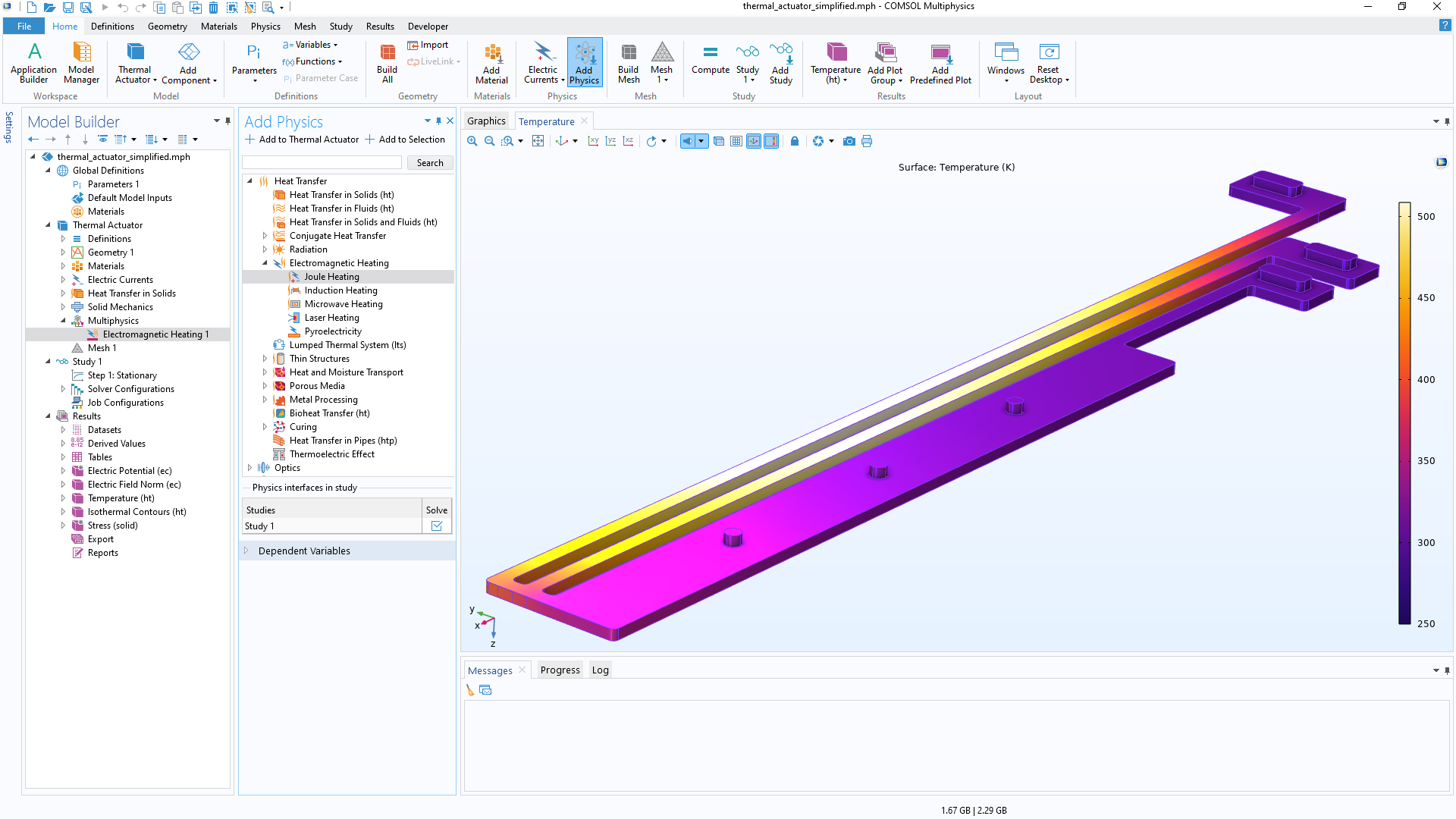
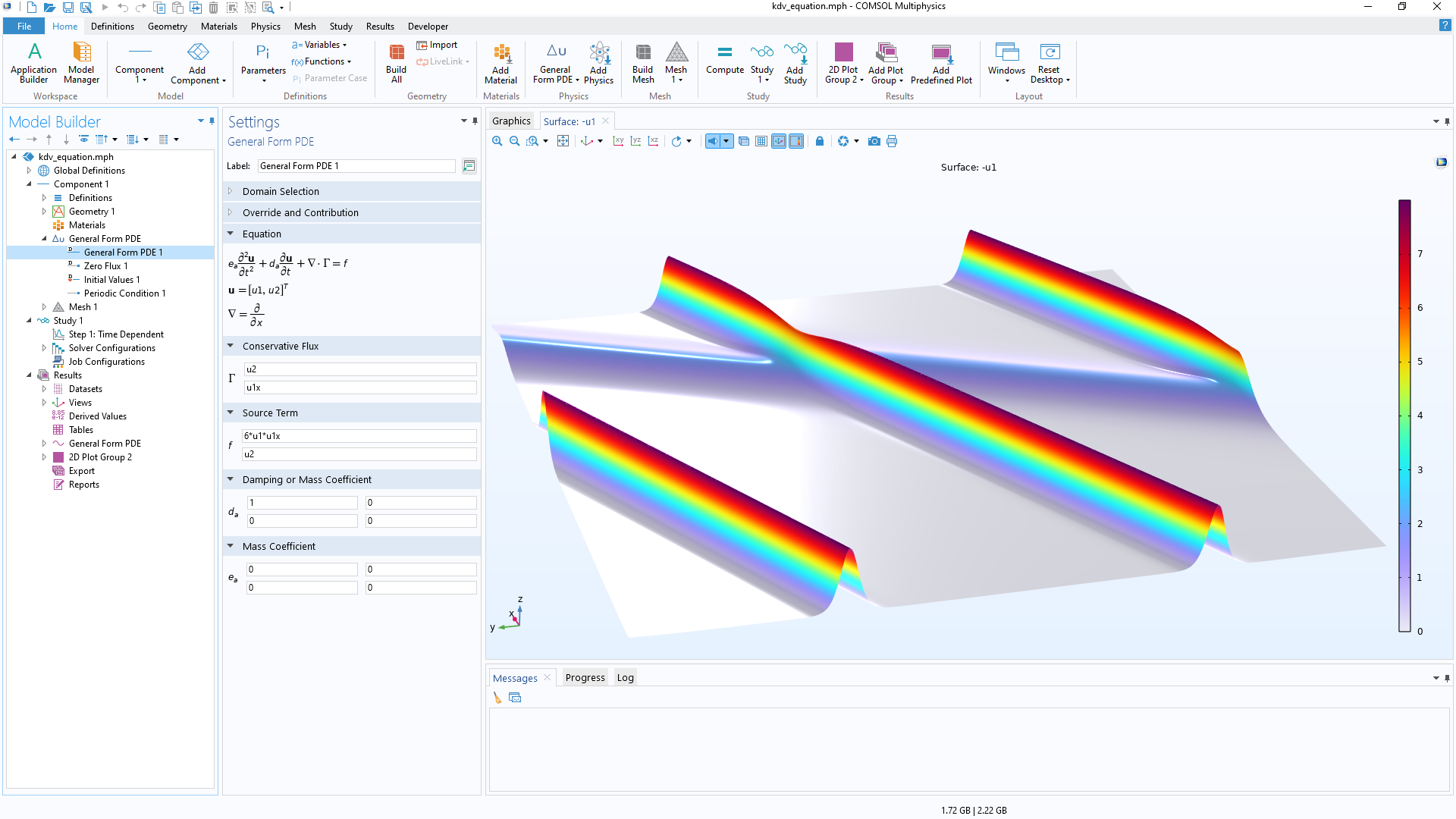
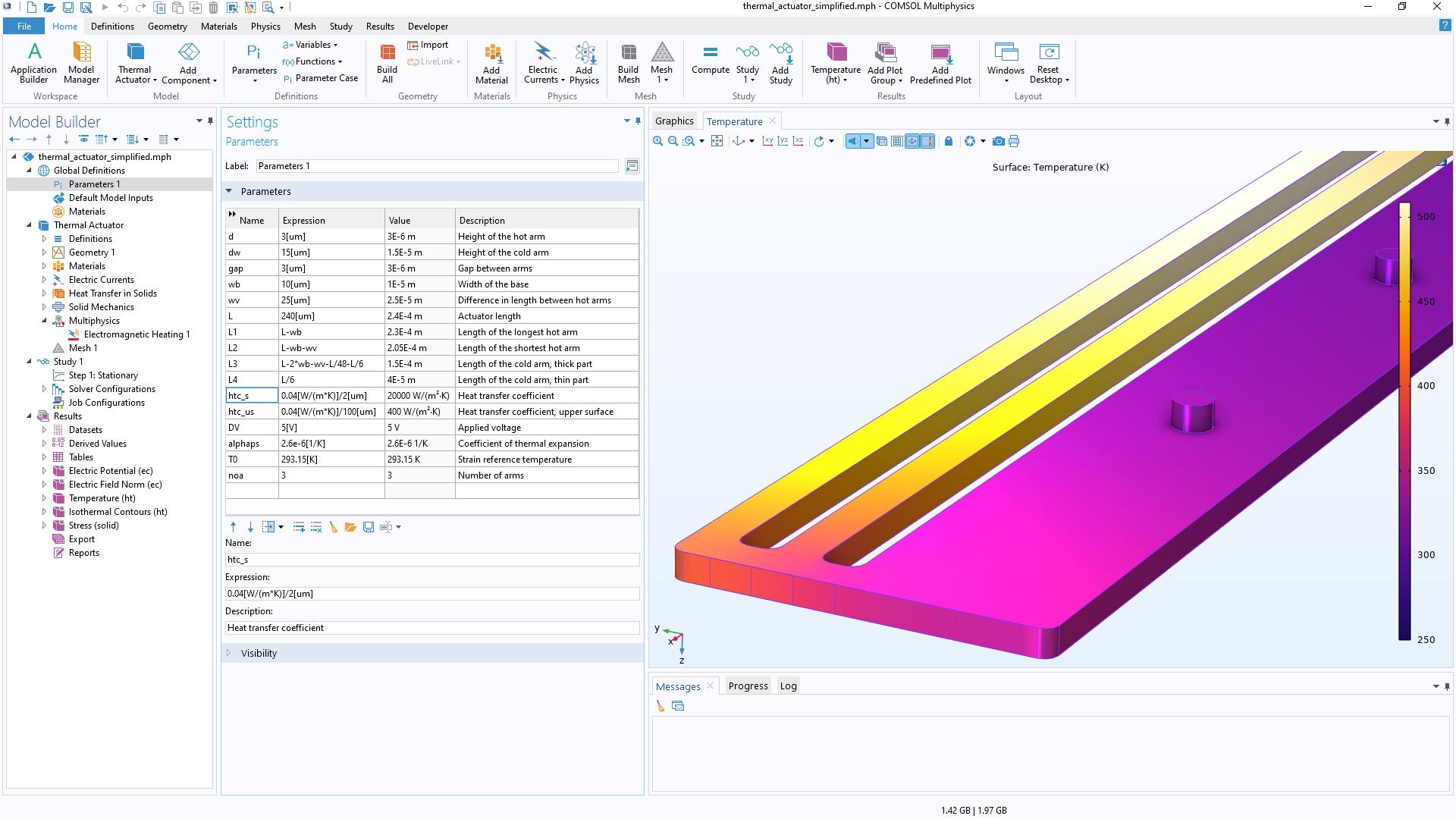
The core COMSOL Multiphysics® package provides geometry modeling tools for creating parts using solid objects, surfaces, curves, and Boolean operations. Geometries are defined by sequences of operations, where each operation is able to receive input parameters for easy edits and parametric studies in multiphysics models. The connection between the geometry definition and defined physics settings is fully associative — a change in the geometry will automatically propagate related changes throughout the associated model settings.
Geometric entities such as material domains and surfaces can be grouped into selections for subsequent use in physics definitions, meshing, and plotting. Additionally, a sequence of operations can be used to create a parametric geometry part, including its selections, which can then be stored in a Part Library for reuse in multiple models.
Import, Repair, Defeature, and Virtual Operations
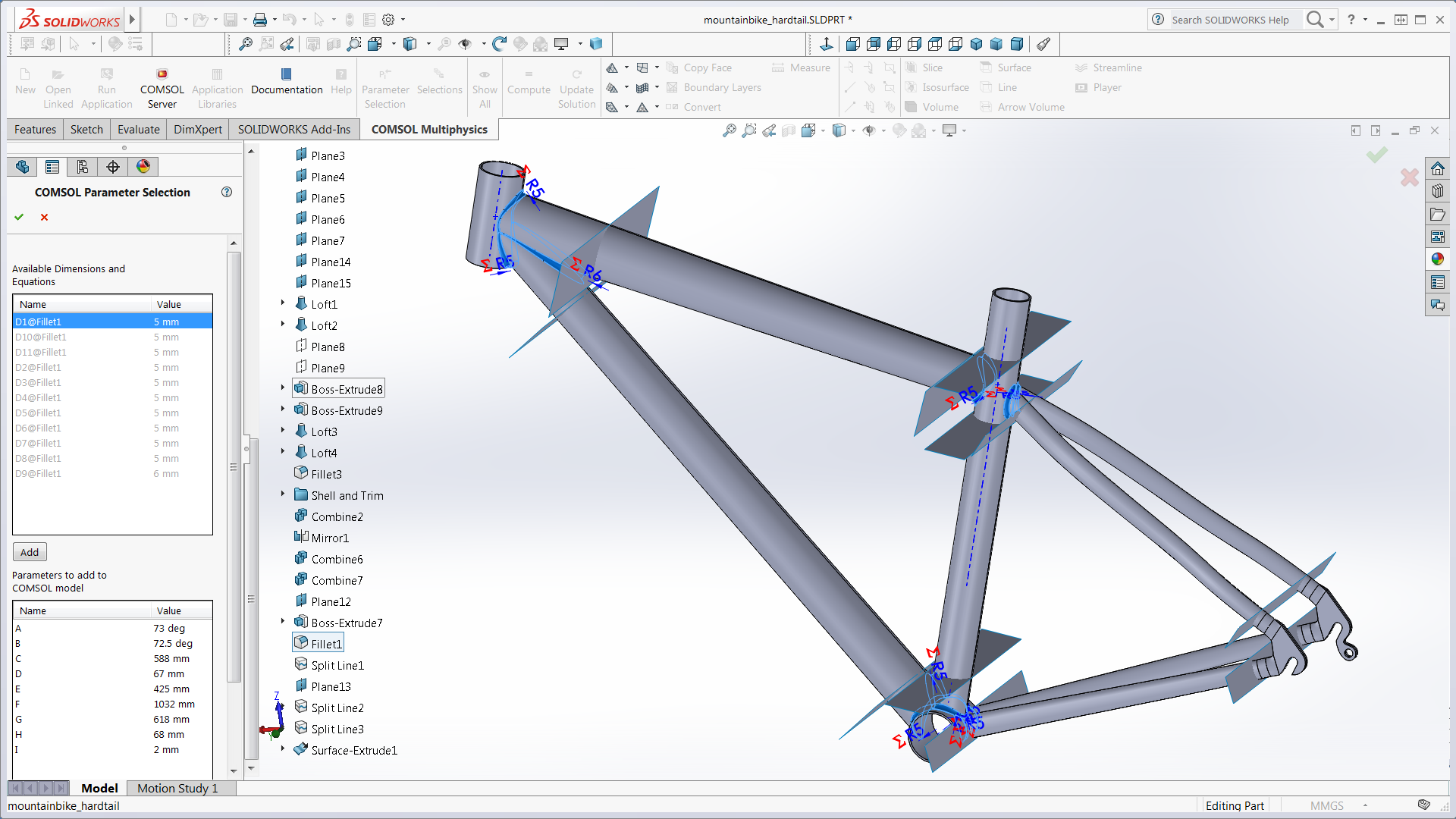
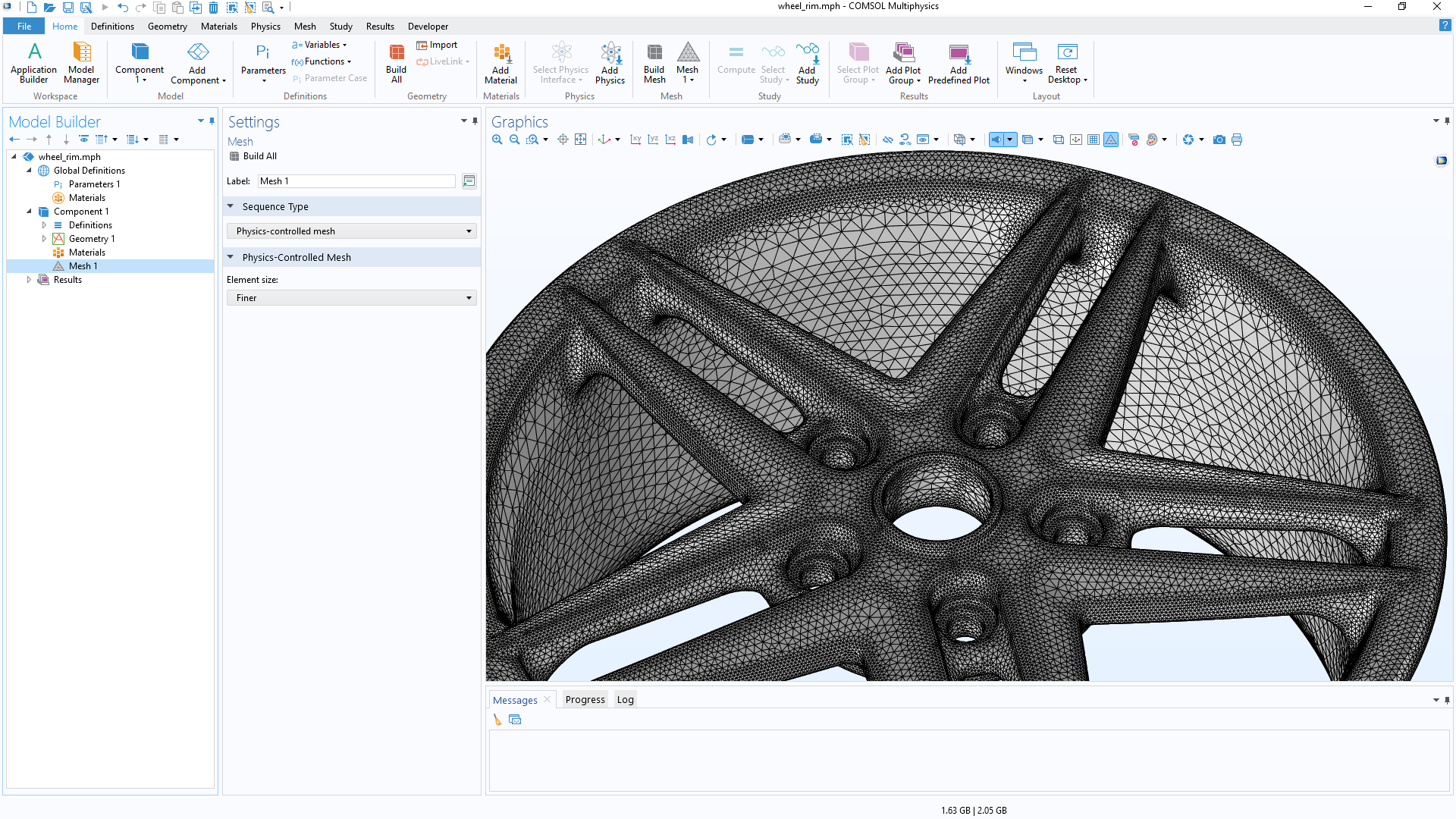
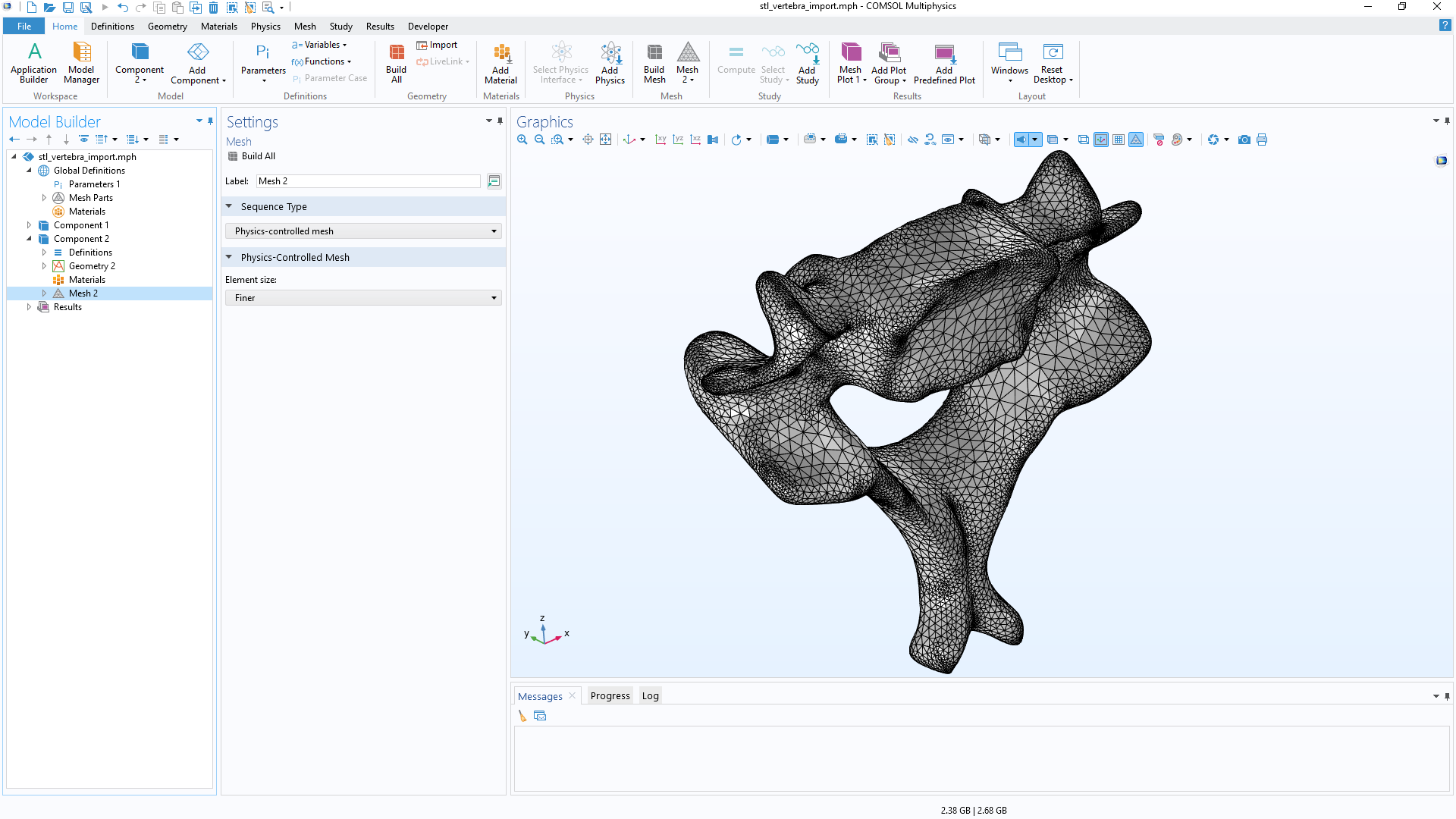
The import of all standard CAD and ECAD files into COMSOL Multiphysics® is supported by the CAD Import Module and ECAD Import Module, respectively. The Design Module further extends the available geometry operations in COMSOL Multiphysics®. Both the CAD Import Module and the Design Module provide the ability to repair and defeature geometries. Surface mesh models, such as in the STL format, can also be imported and then converted to a geometry object by the COMSOL Multiphysics® core package. Import operations are like any other operation in the geometry sequence and can be used with selections and associativity for performing parametric and optimization studies.
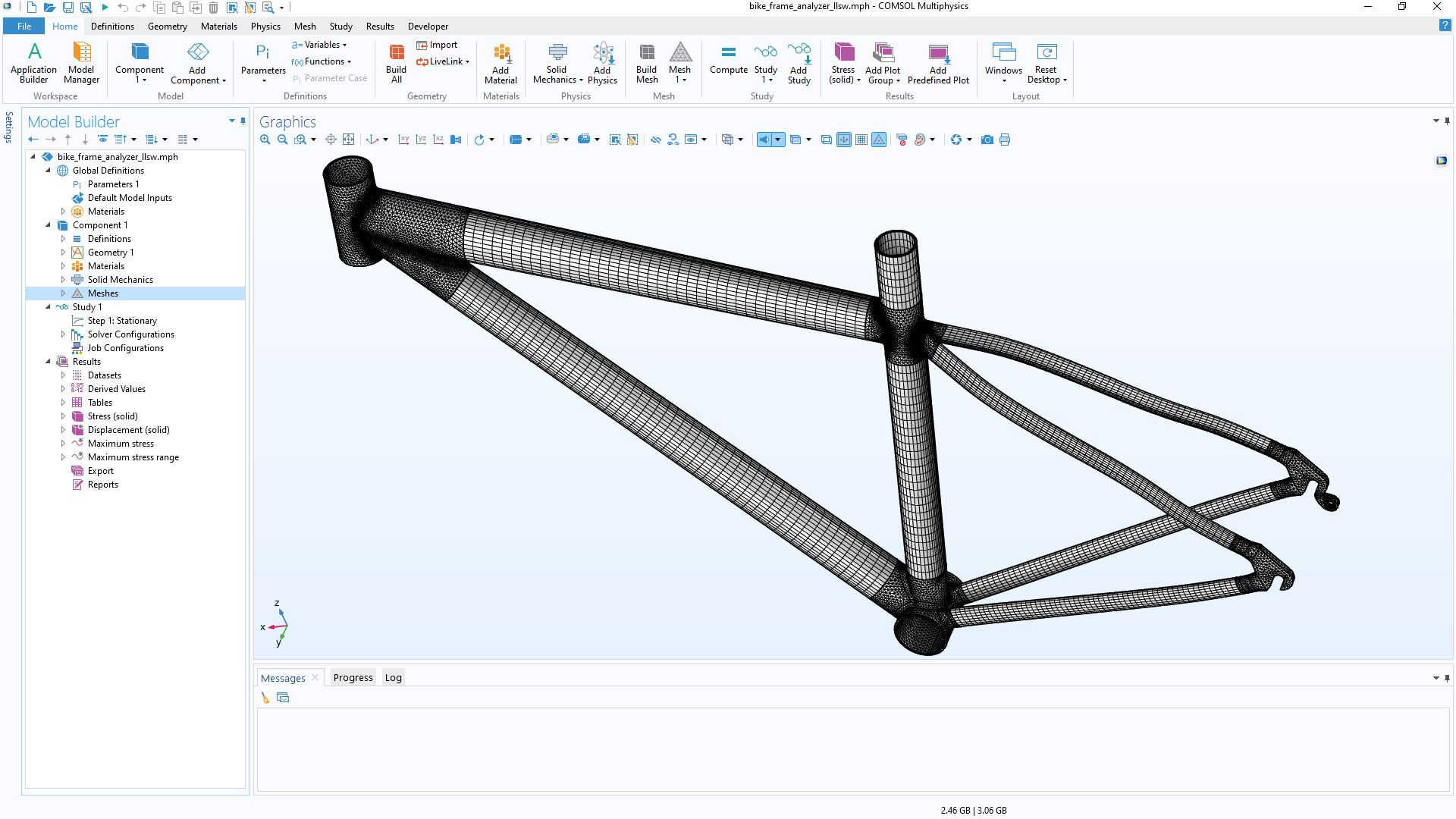
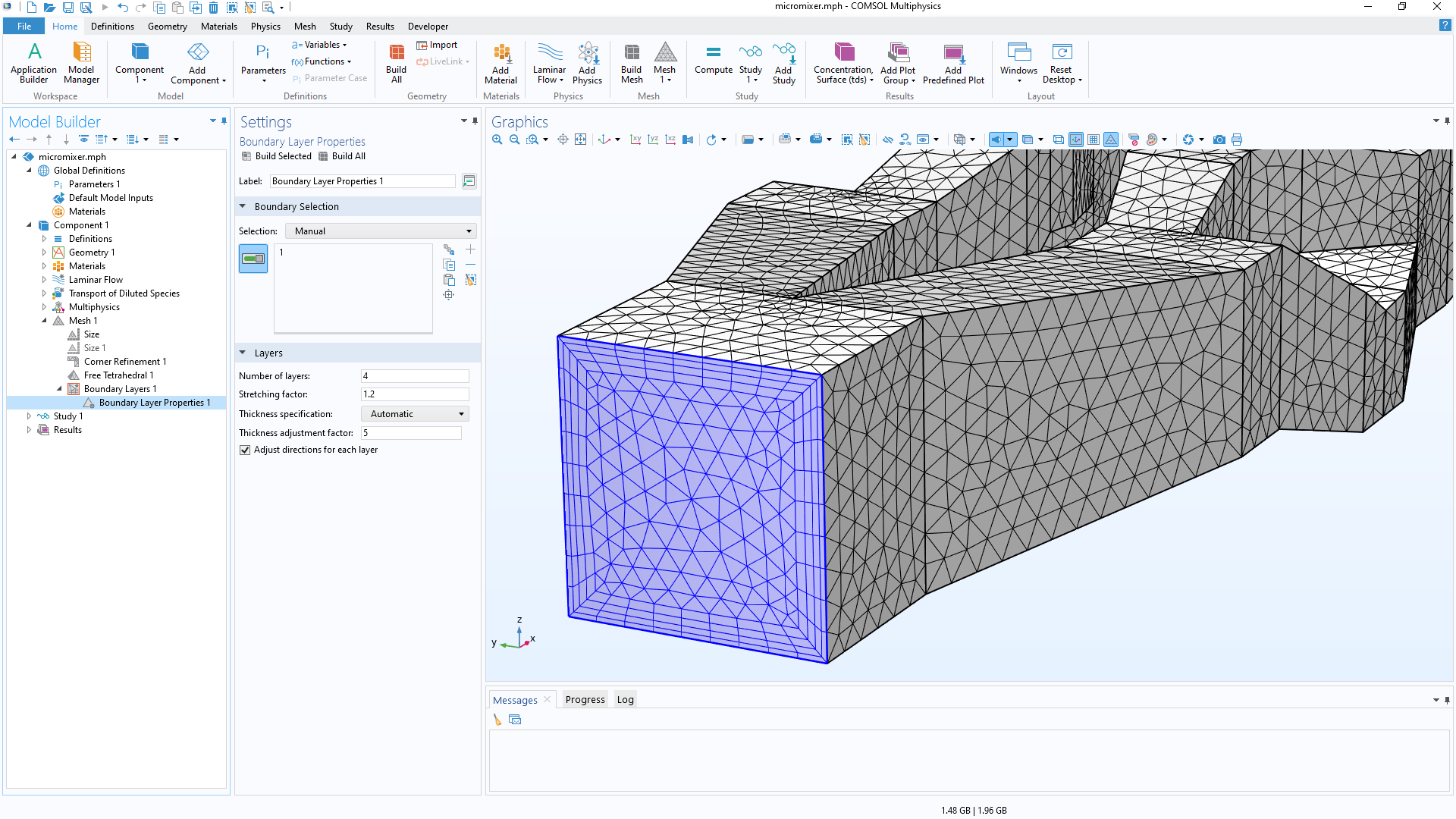
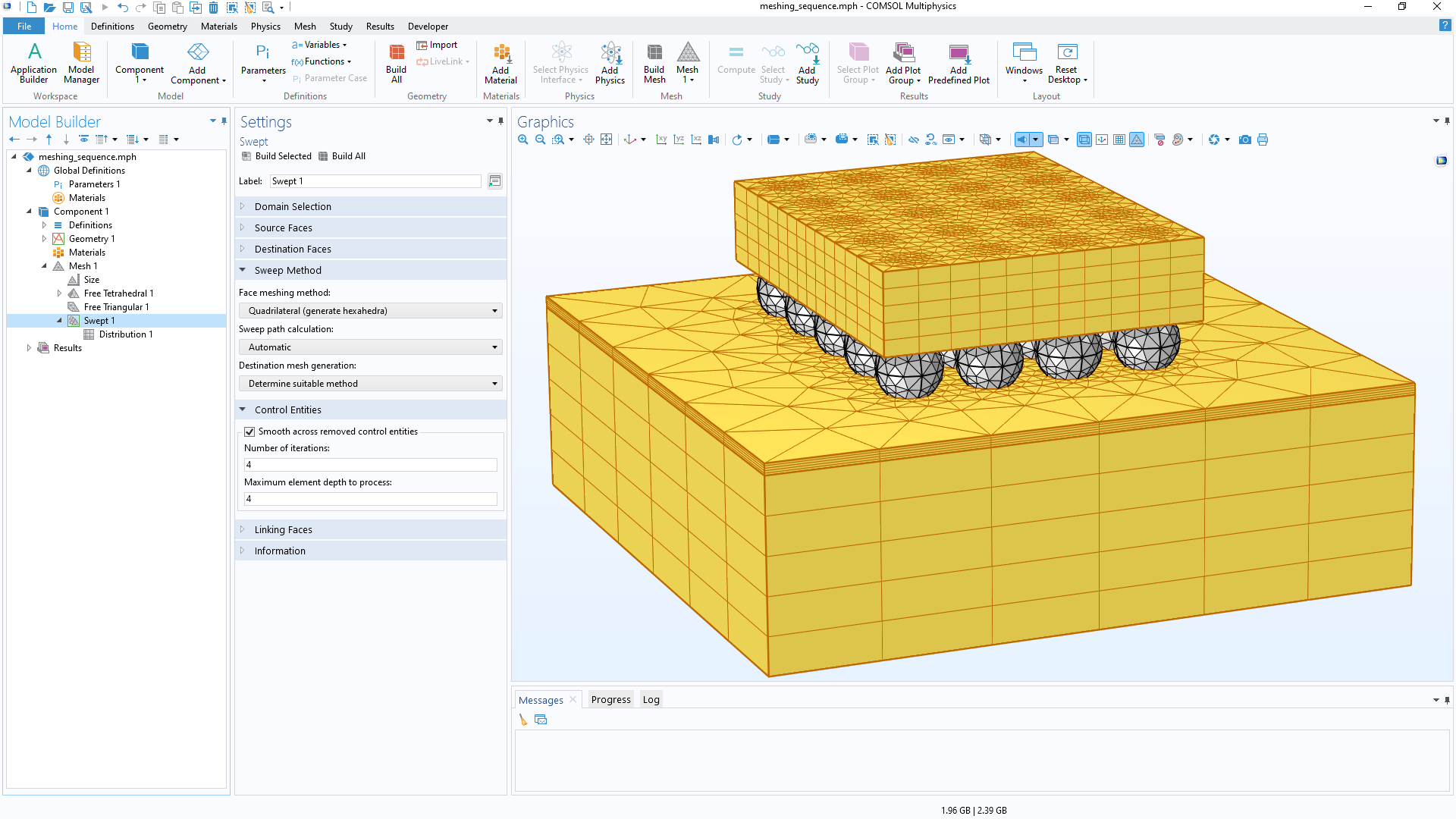
As an alternative to the defeature and repair capabilities of the COMSOL® software, so-called virtual operations are also supported to eliminate the impact of artifacts on the mesh, such as sliver and small faces, which do not add to the accuracy of the simulation. Unlike the defeaturing tools, virtual operations do not change the curvature or fidelity of the geometry, while yielding a cleaner mesh.