MEMS Module Updates
For users of the MEMS Module, COMSOL Multiphysics® version 5.5 brings improved contact modeling, fluid-structure interaction for two-phase flows, random vibration analysis, and more. Browse all of the MEMS updates below.
Random Vibration Analysis
When loads are random in nature, such as turbulent wind gusts or road-induced vibrations on a vehicle, it is not possible to describe them in a deterministic way. Using the new functionality for random response analysis, you can study the response to loads that are represented by their power spectral density (PSD). The loads can be fully correlated, uncorrelated, or have a specific user-defined cross-correlation. Examples of computed results include PSDs of displacements or stresses, as well as the root mean square (RMS) value or higher moments of the spectral distributions.
This new functionality is demonstrated in the following models:
- Random Response Analysis of a Deep Beam (new model)
- Bracket — Random Vibration Analysis (new model)
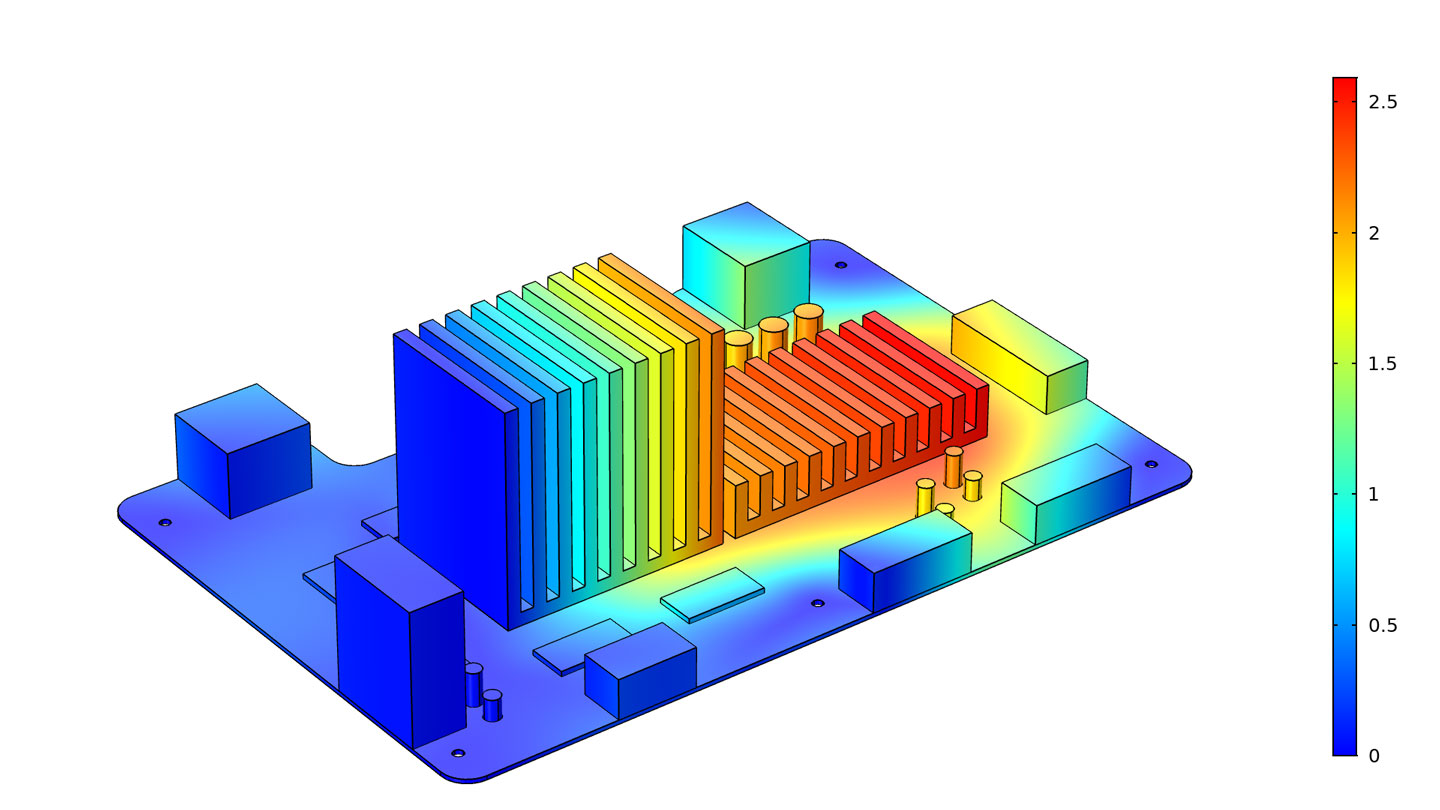
- Random Vibration of a Motherboard (new model)
Contact Modeling Improvements
The contact modeling functionality has been enhanced in several ways:
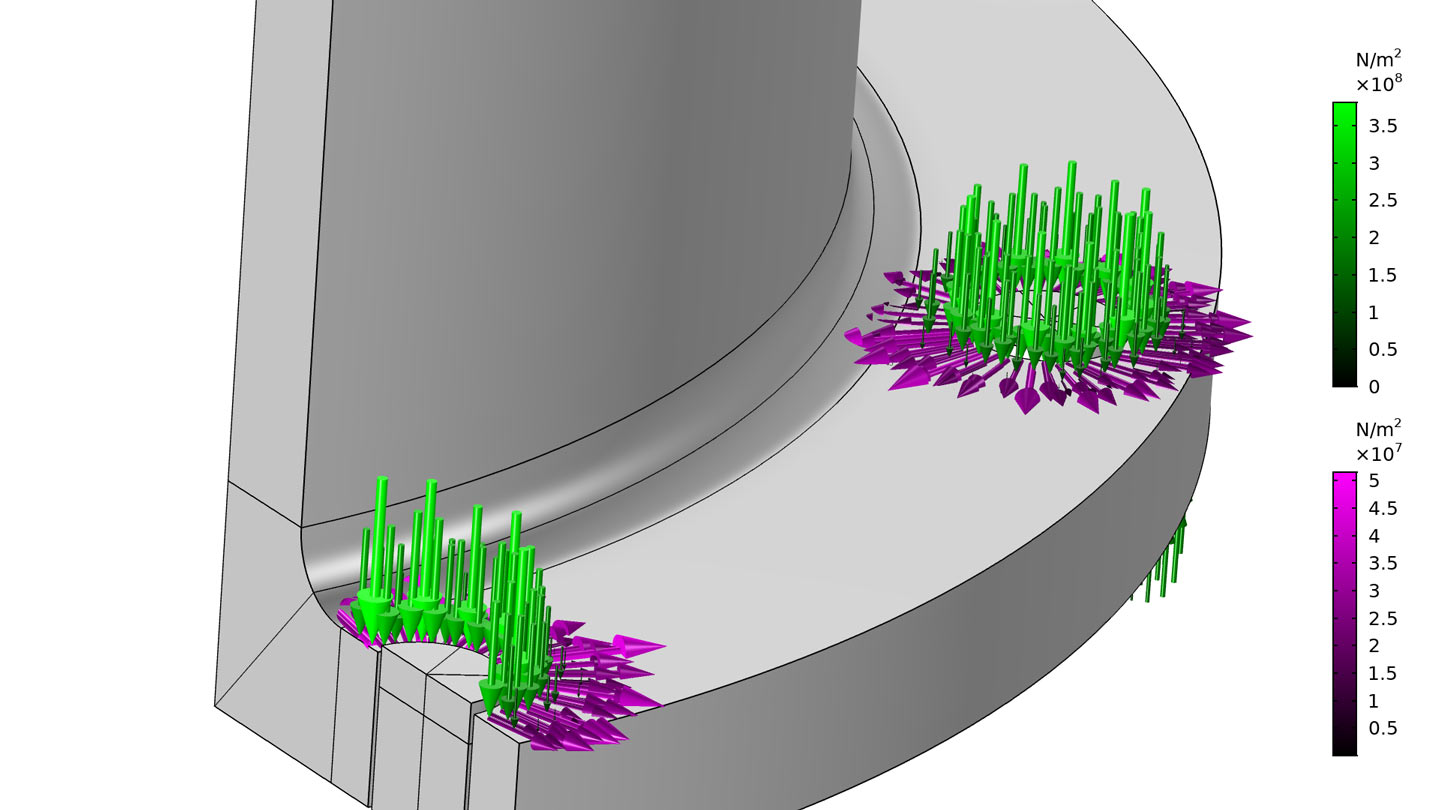
- It is possible to model contact between boundaries in a Solid Mechanics interface and arbitrary meshed surfaces
- The penalty formulation for contact is now the default, providing better stability
- The friction forces are now formulated in local directions along the tangents to the contact boundary, reducing the number of degrees of freedom
- New default plots of the contact forces have been added
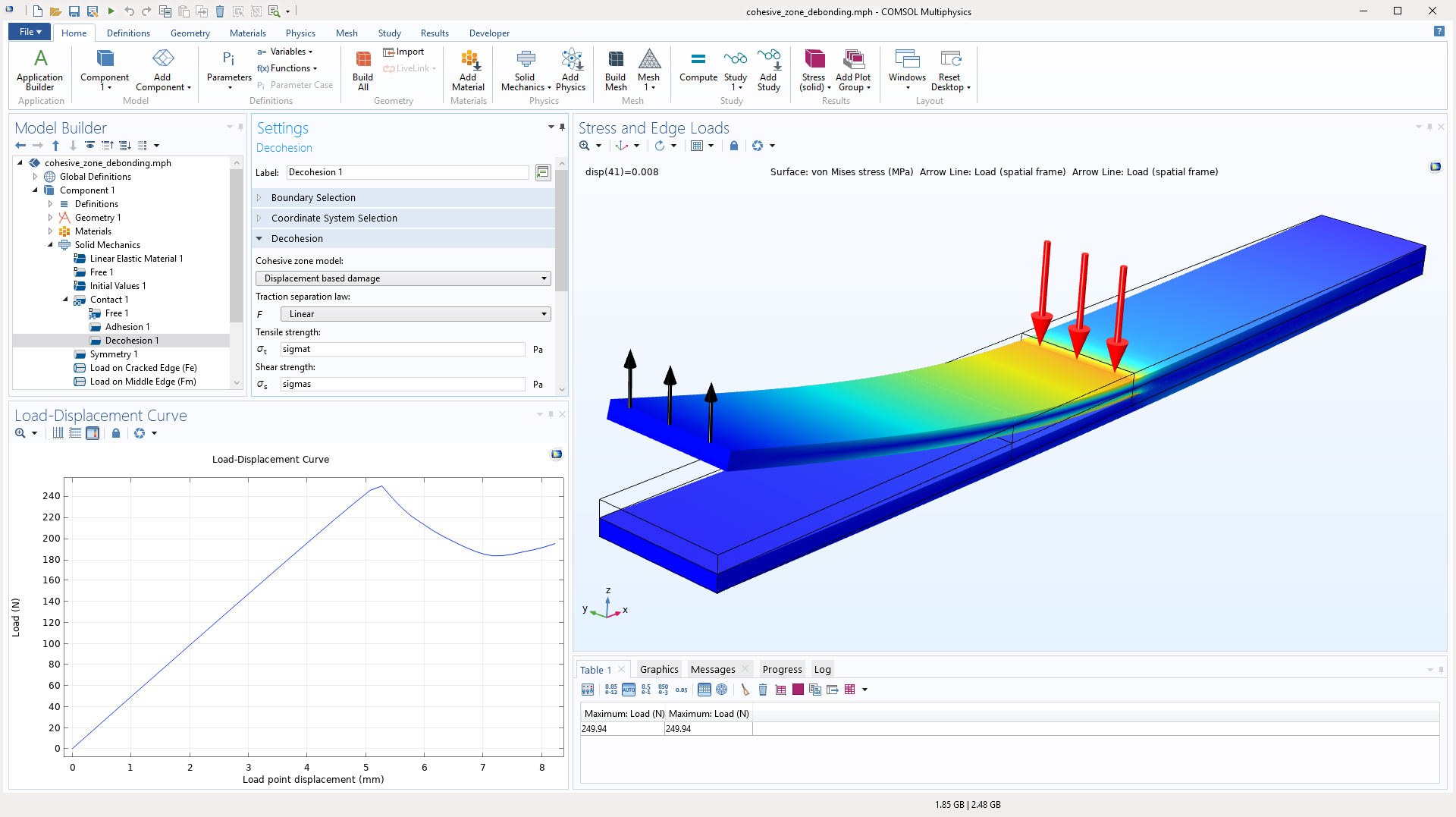
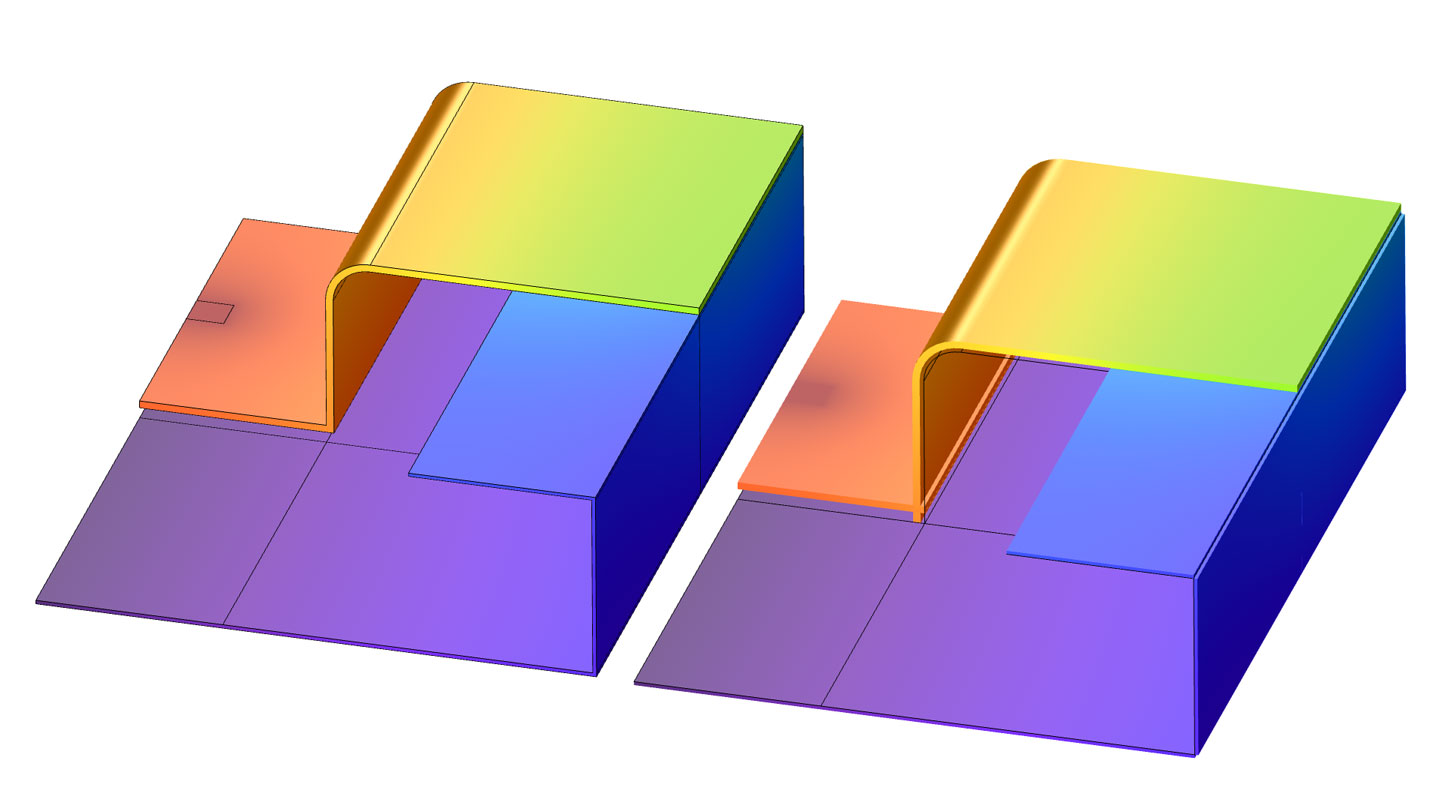
Decohesion Enhancements
There are now two fundamental families of decohesion models: Displacement based damage and the new Energy based damage. Additionally, you can set up models with a new traction separation law, Exponential separation. Decohesion models are inherently unstable, due to the loss of material stiffness, and to improve the numerical behavior, you can include a Delayed damage regularization method.
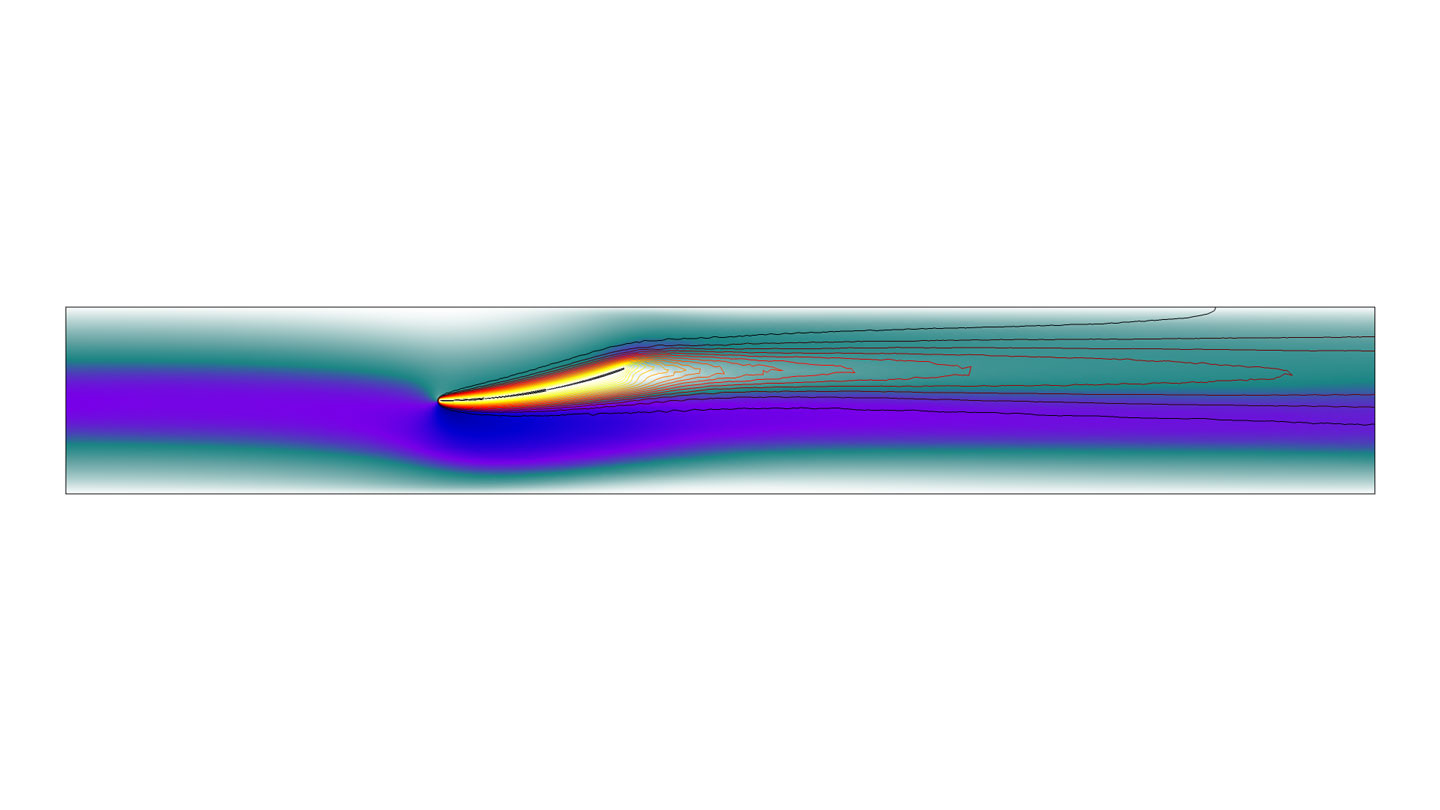
Fluid-Structure Interaction for Two-Phase Flows
The suite of multiphysics interfaces for fluid-structure interaction has two new entries for two-phase flows: Fluid-Solid Interaction, Two-Phase Flow, Phase Field and Fluid-Solid Interaction, Two-Phase Flow, Phase Field, Fixed Geometry. When you select the Fluid-Solid Interaction, Two-Phase Flow, Phase Field option from the Model Wizard, the Laminar Flow, Solid Mechanics, and Phase Field interfaces are added, along with the Fluid-Structure Interaction and Two-Phase Flow multiphysics couplings and a Deforming Domain feature. The fixed geometry option includes the same, minus the Deforming Domain feature. You can see this new functionality in the Two-Phase Flow with Fluid-Structure Interaction model.

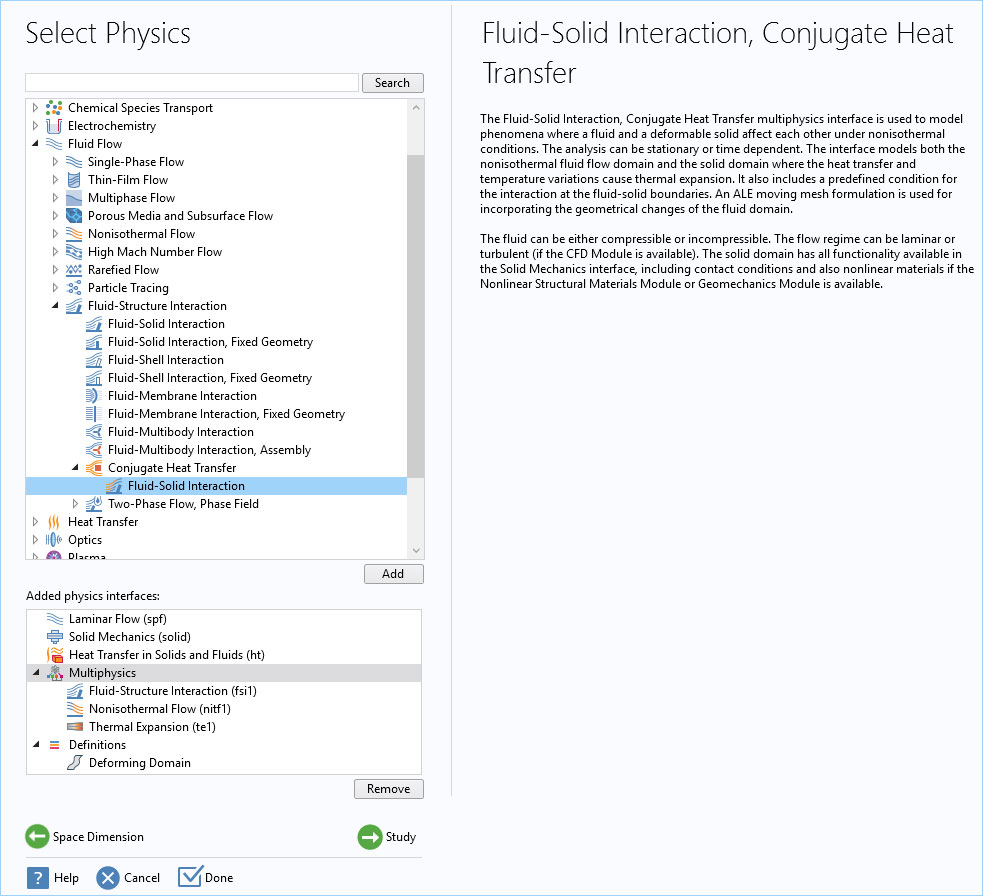
Multiphysics Interface for FSI with Heat Transfer
In some fluid-structure interaction (FSI) problems, heat transfer between the fluid and the solid is important. Usually, this is also accompanied by thermally induced deformations or stresses in the solid. A new multiphysics interface, Fluid-Solid Interaction, Conjugate Heat Transfer has been added to make it convenient to set up models combining these effects. It combines the three physics interfaces Heat Transfer in Solids and Fluids, Solid Mechanics, and Laminar Flow together with a moving mesh and appropriate multiphysics couplings. As with all other FSI interfaces, the flow can easily be changed from laminar to be turbulent. You can see this new feature in the Bimetallic Strip in Airflow model.
Solid Mechanics on Rotating Domains
When modeling multiphysics problems in systems where there is a mixture of rotating and stationary domains, you can use the Solid Mechanics interface in a corotating configuration, such that only the deformations relative to the rotation are modeled. This is far more efficient than solving for the total displacements that include large global rotations. In many cases, it is even possible to use a linear formulation for the mechanical problem. To this end, the Rotating Frame feature provides a superposition of the rigid body rotation, and the relative displacements, for controlling the spatial frame on which the other physics interfaces are operating.
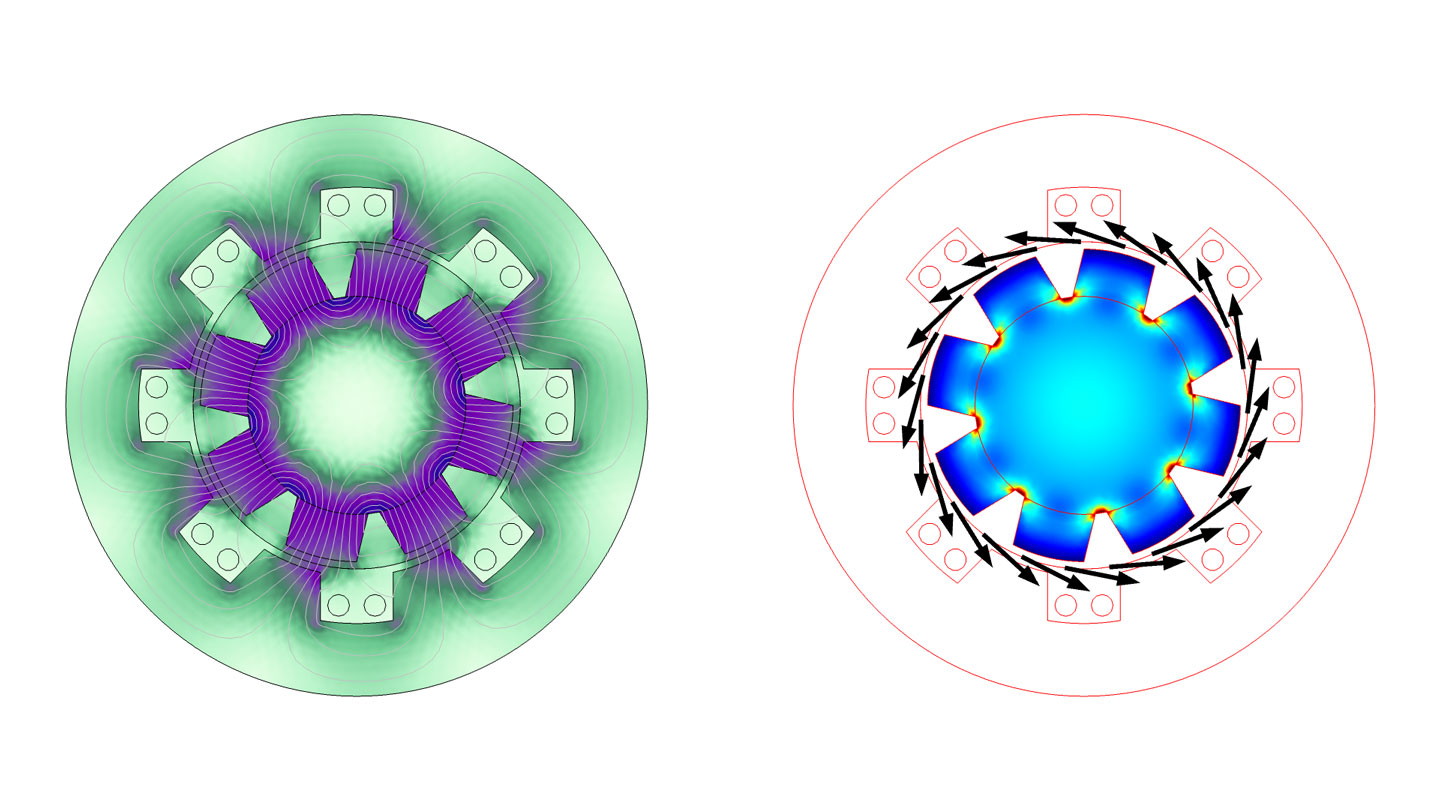
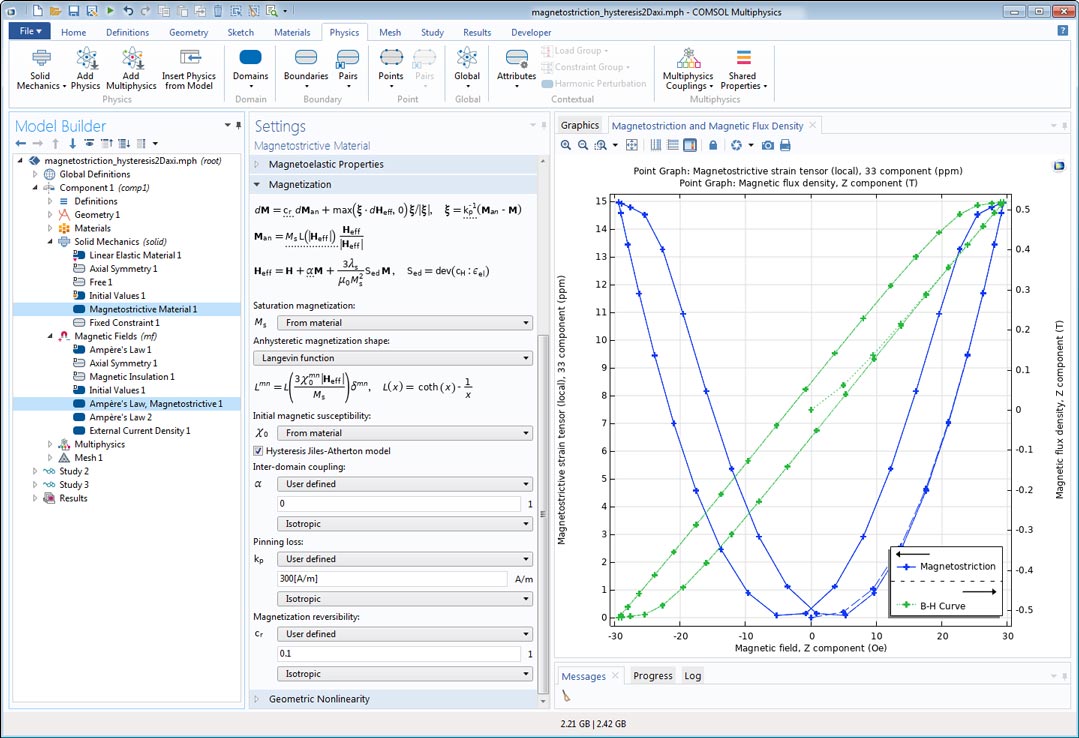
Magnetostrictive Material with Hysteresis
The nonlinear Magnetostrictive Material has been extended to include the Jiles–Atherton model of magnetic hysteresis. The model is suitable for investigating the hysteretic loss effects in applications such as power transformers and rotating electric machines. The model parameters are related to microscopic physical effects in magnetic materials and they can also be estimated based on experimental data.
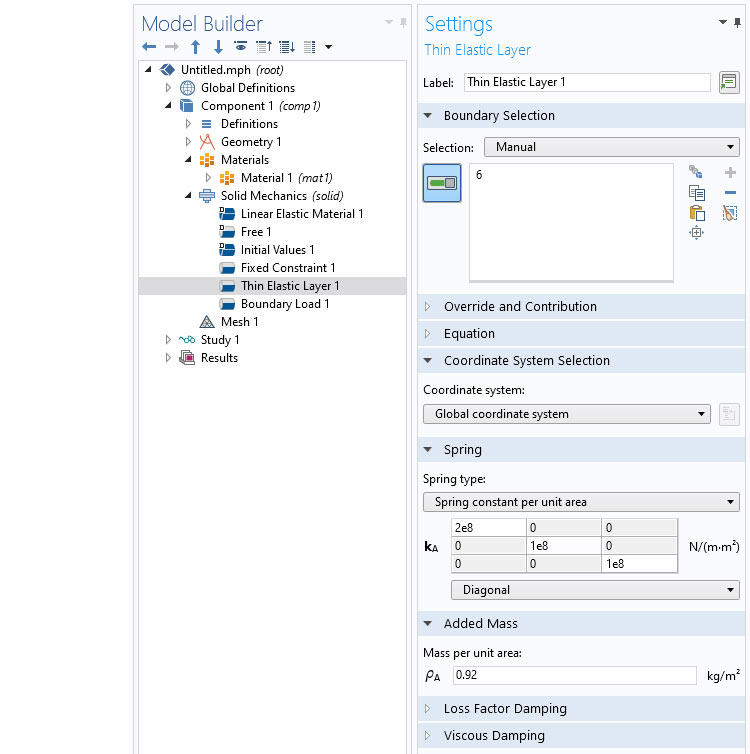
Thin Elastic Layers with Mass
The Thin Elastic Layer feature, intended for abstract modeling of layers that are thin compared to the rest of the geometry, has been augmented by a possibility to add a mass distribution. This can be important for high-fidelity structural dynamics simulations.
{kind=link}
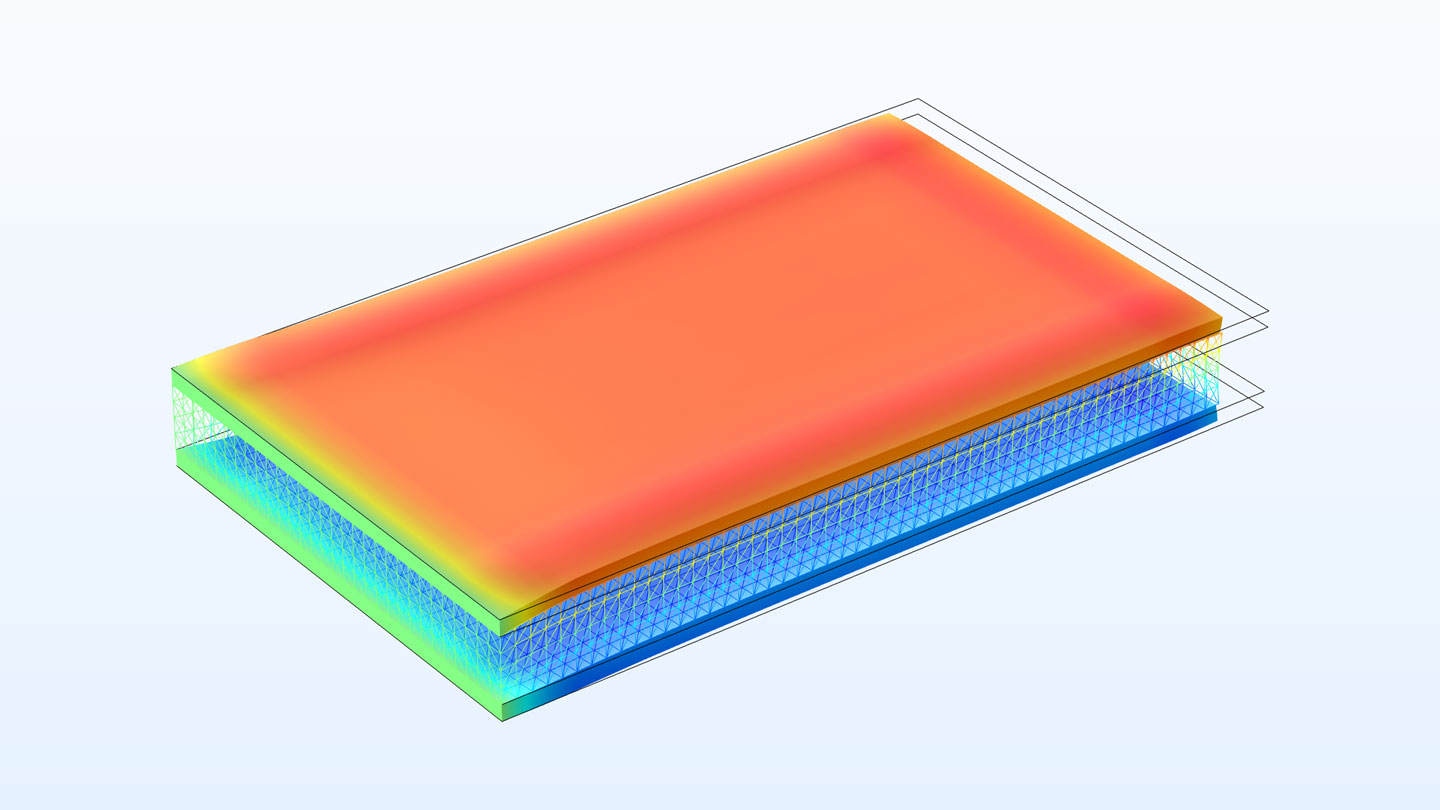
Piezoelectric Material in Layered Shell Interface
The addition of piezoelectric material modeling capability to the Layered Shell interface makes it possible to model thin piezoelectric devices and sensors where a piezoelectric material is embedded in a composite laminate. A new multiphysics interface, Piezoelectricity, Layered Shell has been added for a convenient setup of models. It combines the two physics interfaces Layered Shell and Electric Currents in Layered Shells with a Layered Piezoelectric Effect multiphysics coupling. You can see this functionality in the new Piezoelectricity in a Layered Shell model. Note that to access this functionality, you need either the AC/DC Module or MEMS Module in addition to the Structural Mechanics Module and the Composite Materials Module.
Electric Currents in Shells and Electric Currents in Layered Shells Interfaces
The new (layered) shell interfaces are an evolution of the previously available Electric Currents, Layered Shell and Electric Currents, Shell interfaces, with a focus on better usability and robustness. Modeling of both nonlayered shells, as well as layered shells, has become more streamlined with improved integration to other physics (multiphysics).
For layered shells, the physics interface models the shell’s boundary selection in 3D, as well as an extra dimension that points in the shell’s normal direction. This way, you can model both tangential and normal electric fields inside the shell, and as a result, you can use the interface to model conductors and dielectrics for Stationary, Time Dependent, and Frequency Domain studies. Combining either the MEMS Module or Structural Mechanics Module with the Composite Materials Module, this allows for modeling piezoelectric materials in layered shells.
You can see these new interfaces in the following models:
- piezoelectricity_layered_shell (new model)
- heating_circuit
- planar_pcb_coil
- solid_multilayer_shell_comparison
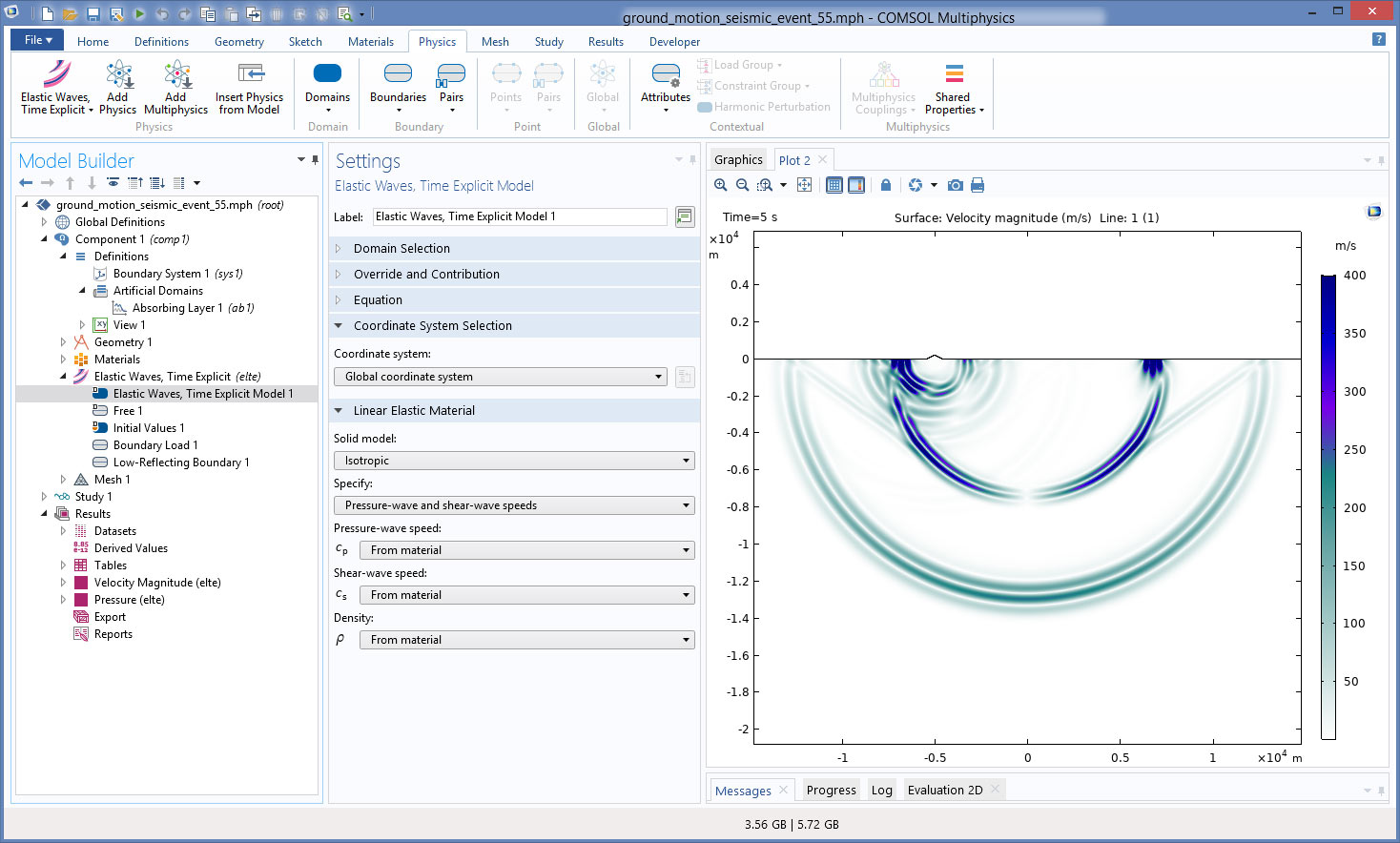
New Elastic Waves, Time Explicit Physics Interface
The new Elastic Waves, Time Explicit physics interface is based on the discontinuous Galerkin time explicit method and enables efficient multicore computations of elastic wave propagation in solids. Features are included to provide realistic material data including anisotropy and damping. The interface is suited for modeling ultrasound propagation in solids, such as with transducers and sensors, and for nondestructive testing (NDT) applications, and is applicable to any acoustically large system that involves transient propagation over many wavelengths, which includes seismic wave propagation in soil and rock.
You can see the new interface used in the following models:
- Ground Motion After Seismic Event: Scattering off a Small Mountain (new model)
- Isotropic-Anisotropic Sample: Elastic Wave Propagation (new model)
- Angle Beam Nondestructive Testing (new model)
- Immersion Ultrasonic Testing Setup (new model)
New Tutorial Models
Version 5.5 brings new tutorial models.
Tensile Test with Strain-Rate-Dependent Plasticity
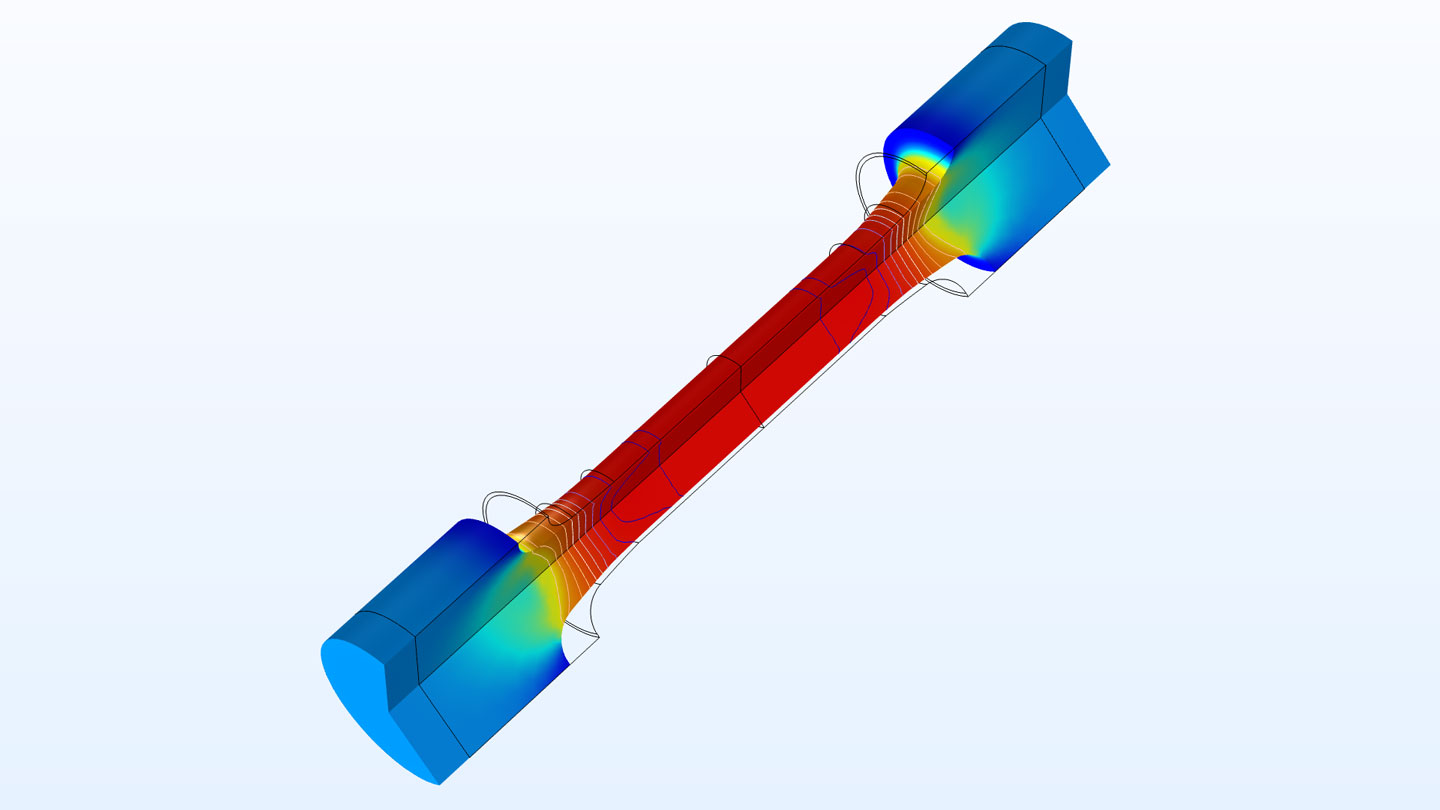
Application Library Title:
strain_rate_dependent_plasticity
Pull-In and Pull-Out Analysis of a Biased Resonator
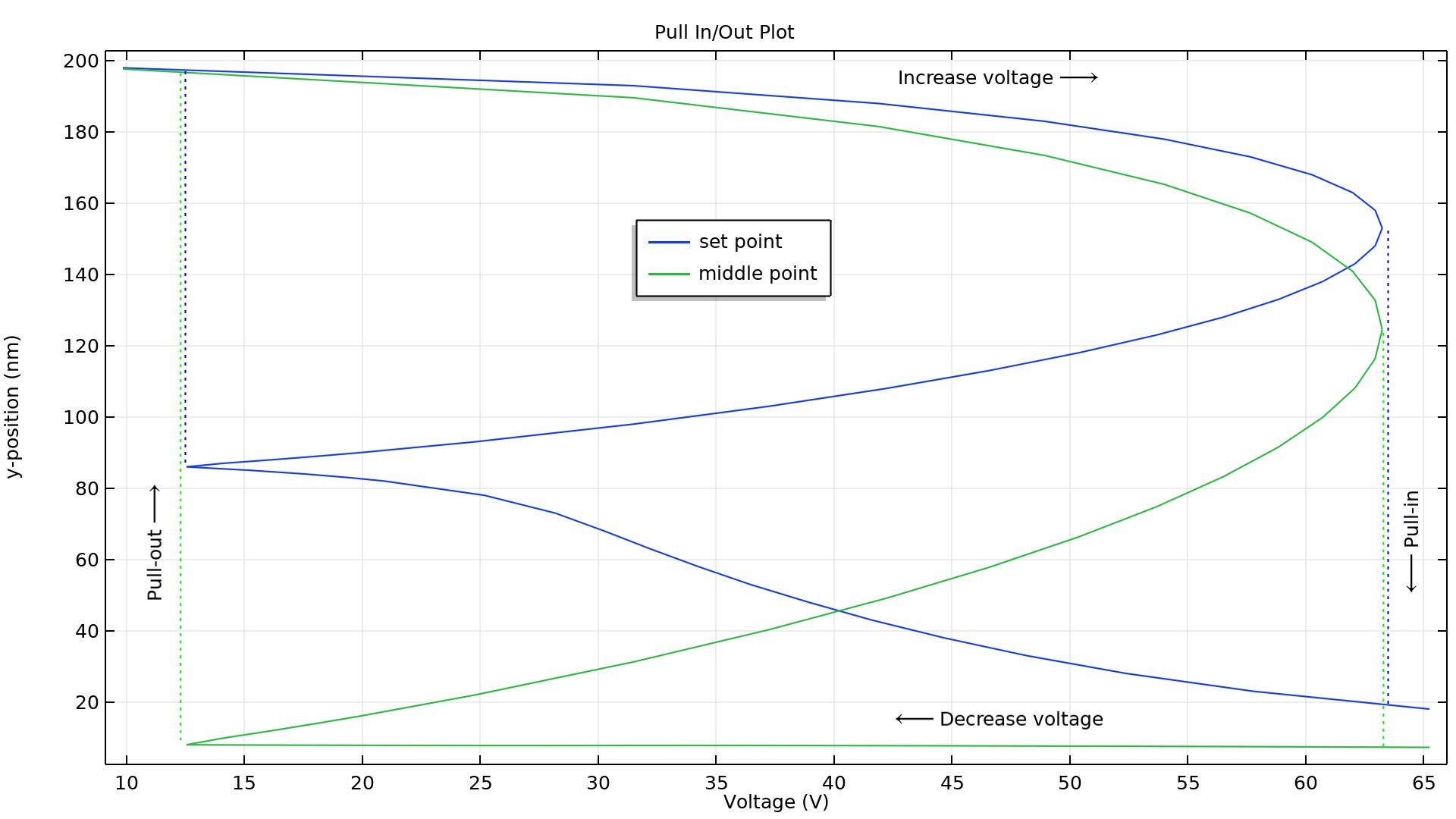
Application Library Title:
biased_resonator_2d_pull_in_pull_out